
Das kleine Testprogramm hilft auf Dauer natürlich nicht weiter. Es war ja auch nur zum Test gedacht. Sowohl dieses kleine Testprogramm als auch die in den Arduino-Bibliotheken vorhandenen Programmmteile haben den Nachteil, dass jegliche Motorbewegungen immer das Programm solange aufhalten, bis der Motor die Zielposition erreicht hat. Da beim Wickelautomat aber andere Programmteile auch in Echtzeit laufen müssen, wäre das fatal.
Ich habe eine andere Programmbibliothek gefunden: AccelStepper
Der Vorteil dieser Bibliothek ist, dass eine Bewegung initiiert wird und bei jedem Durchlauf der loop()-Funktion ein Stück weit vorwärtsgetrieben wird. Das Programm muss also nicht an der entsprechenden Stelle warten.
Zunächst muss die neue Bibliothek in die Arduino Entwicklungsumgebung integriert werden. Dazu wird die aktuelle Version von der AccelStepper-Projektseite geladen. Der entpackte Ordner AccelStepper wird nach Arduino/libraries kopiert. Kleine Kontrolle: In diesem Ordner muss die AccelStepper.h enthalten sein.
Von den Beispielen probiere ich als Erstes „Bounce.pde“
// Bounce.pde
// -*- mode: C++ -*-
//
// Make a single stepper bounce from one limit to another
//
// Copyright (C) 2012 Mike McCauley
// $Id: Random.pde,v 1.1 2011/01/05 01:51:01 mikem Exp mikem $
#include <AccelStepper.h>
// Define a stepper and the pins it will use
AccelStepper stepper; // Defaults to AccelStepper::FULL4WIRE (4 pins) on 2, 3, 4, 5
void setup()
{
// Change these to suit your stepper if you want
stepper.setMaxSpeed(100);
stepper.setAcceleration(20);
stepper.moveTo(500);
}
void loop()
{
// If at the end of travel go to the other end
if (stepper.distanceToGo() == 0)
stepper.moveTo(-stepper.currentPosition());
stepper.run();
}
Das ist aber noch nicht ganz das, was ich brauche. Die Anschlussart passt noch nicht. Sie wird definiert über AccelStepper::
Im Beispiel wird über eine H-Bridge gearbeitet. 4 Steuerleitungen werden gebraucht. Ich arbeite aber mit einem Treiber, der nur Step und Dir kennt. Der Constructor wir also geändert in:
AccelStepper::DRIVER
… und da ich STEP auf Pin 2 und DIR auf Pin5 gelegt habe, muss auch das dem Construktor bekannt gegeben werden. Der gesamte Constructor lautet also auf:
AccelStepper stepper(AccelStepper::DRIVER, 2, 5);
„stepper“ ist übrigens ganz einfach der Name meines Motors. Alle Funktionen werden mit diesem Namen aufgerufen: stepper.xxxx();
Das ist das fertige Programm in der Entwicklungsumgebung. Erfolgreich kompiliert ist es auch schon.
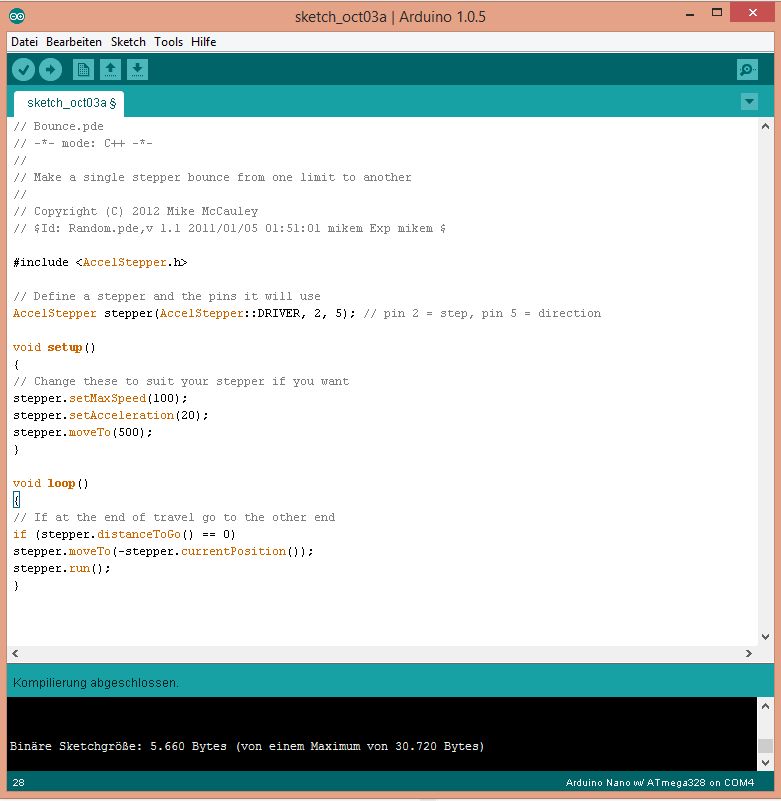
Das Programm habe ich dann übertragen und dann läuft es auch schon. Aber der Treiber wird sehr schnell heiß und nach kurzer Zeit bleibt der Motor stehen. Also Speed runter. Poti auf Treiber einstellen?
Die Referenzspannung lag tatsächlich bei 1,5V. Das ist erheblich zu viel. Nach der üblichen Formel berechnet benötige ich 0,875V. Ich habe das Poti im Uhrzeigersinn gedreht, so dass ich jetzt etwas über 0,6V habe. Jetzt scheint es zu passen. Wenn noch Last draufkommt, werde ich vielleicht höher drehen müssen. Komischerweise ist im Schaltbild von Pololu die Drehrichtung zur Reduzierung der Spannung genau andersherum ausgewiesen. Seltsam.
Ich habe auch mal den Befehl moveTo auf 200 gesetzt. Der Motor hat schließlich 200 Schritte pro Umdrehung. Erst habe ich gestaunt, dass in jedem Zyklus die Fahne 2 Runden dreht. Aber klar. Von 200 bis -200 sind es ja auch 2 volle Umdrehungen. Also passt alles.
Ich spiele jetzt noch ein wenig mit setMaxSpeed und SetAcceleration.
Der erste Wert sagt aus, wieviele Schritte pro Sekunde maximal ausgeführt werden dürfen. Der zweite Wert sagt aus wie stark die Beschleunigung sein soll in Schritten pro Sekunde².