
Der Aufwand für die Integration des original Tronxy Abstandssensors auf magnetischer Basis in ein BTT SKR 1.4Turbo mit MARLIN ist einigermaßen hoch. Da es schon beschlossene Sache war, dass ich auf den 3D Touch wechsle, wollte ich mir diesen Aufwand nicht mehr antun. Hier also die Beschreibung zur Integration.
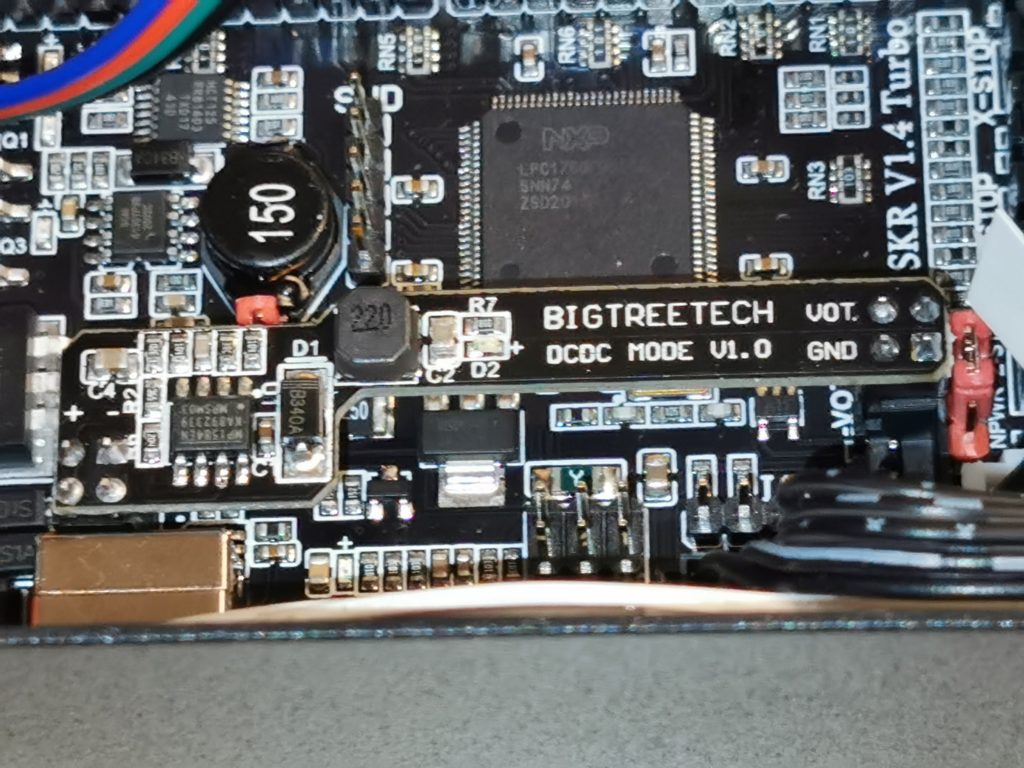
Zu Beginn integriere ich die DCDC-Bridge um die Stromversorgung für Display und den Servomechanismus des 3D Touch sicherzustellen. Die BTT DCDC-Bridge ist eine kleine Zusatzplatine, die die 12 bzw.24V auf Logikverträgliche 5V herunterregelt und dann dem SKR 1.4-Board wieder zur Verfügung stellt. Genauer gesagt wird eigentlich der sogenannte NPWR-Anschluss besser versorgt. Damit die kleine Platine auch wirken kann, muss noch ein Jumper umgesetzt werden.
Es empfiehlt sich eigentlich die DCDC-Bridge gleich mit der WIFI-Option zusammen zu kaufen (linker Link). Wenn man das nicht will, gibt es die DCDC-Bridge natürlich auch einzeln zu kaufen.
Ich weise darauf hin, dass ich beim Kauf über diesen Link eine kleine Provision bekomme. Für den Besteller ändert sich der Preis dadurch nicht.
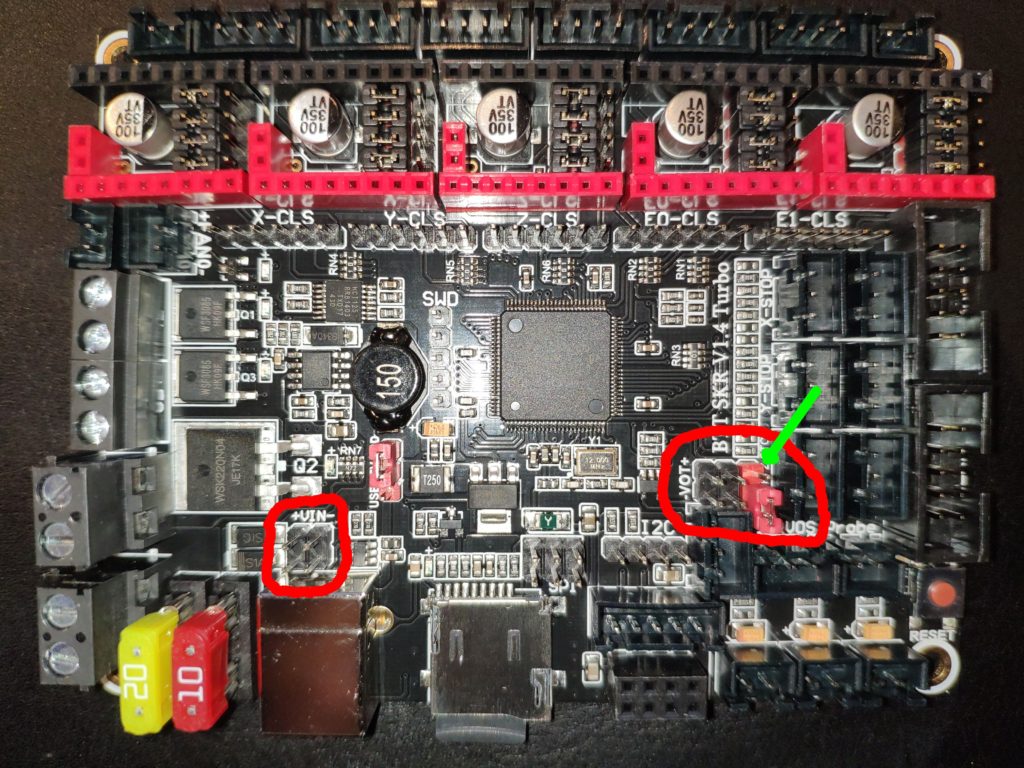
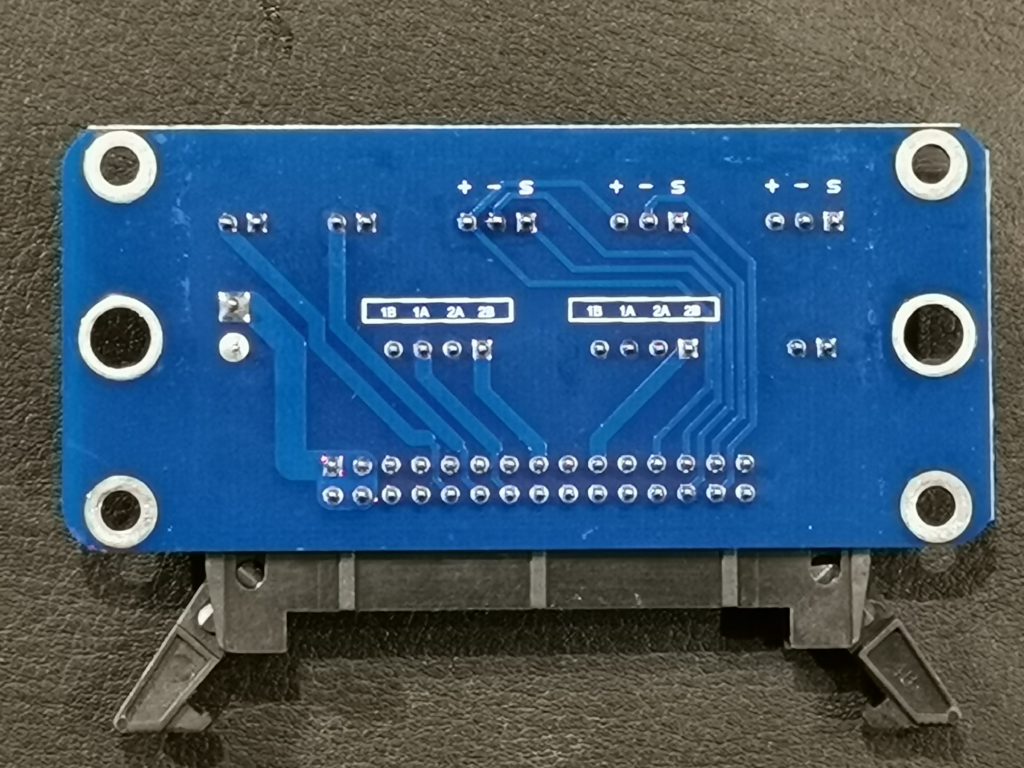
Die DCDC-Bridge wird auf der linken Seite auf die +VIN- Pins gesteckt und auf der rechten Seite auf die -VOT+ Pins. Siehe dazu auch die roten Markierungen in dem obigen Bild. Der grün markierte Jumper wird dann von der hier gezeigten unteren Position in die obere gesteckt.
Nachdem die Stromversorgung gesichert ist, kann ich mich um den neuen Sensor kümmern.
Auch hier gibt es zwei Lieferumfänge. Der größere Lieferumfang rechts erspart vermutlich einigen Bastelaufwand, den ich unten beschreibe. Aber selbst der linke kleinere Umfang ist schon gegenüber meiner Version verbessert.
An dieser Stelle ein Dank an die Firma UniTak3D, die mir freundlicherweise den Sensor kostenfrei geliefert hat. Wie immer hat das jedoch keinen Einfluss auf meinen hier dargestellten Bericht.
Im ersten Schritt, will ich die Hardware installieren. Über diverse Informationen im Internet habe ich erfahren, dass im eingefahrenen Zustand die Spitze des 3D Touch etwa 3mm über der Spitze des Hotends liegen soll. Als Installationspunkt habe ich die Stelle benutzt, an der vorher der blaue Magnet-Sensor saß.
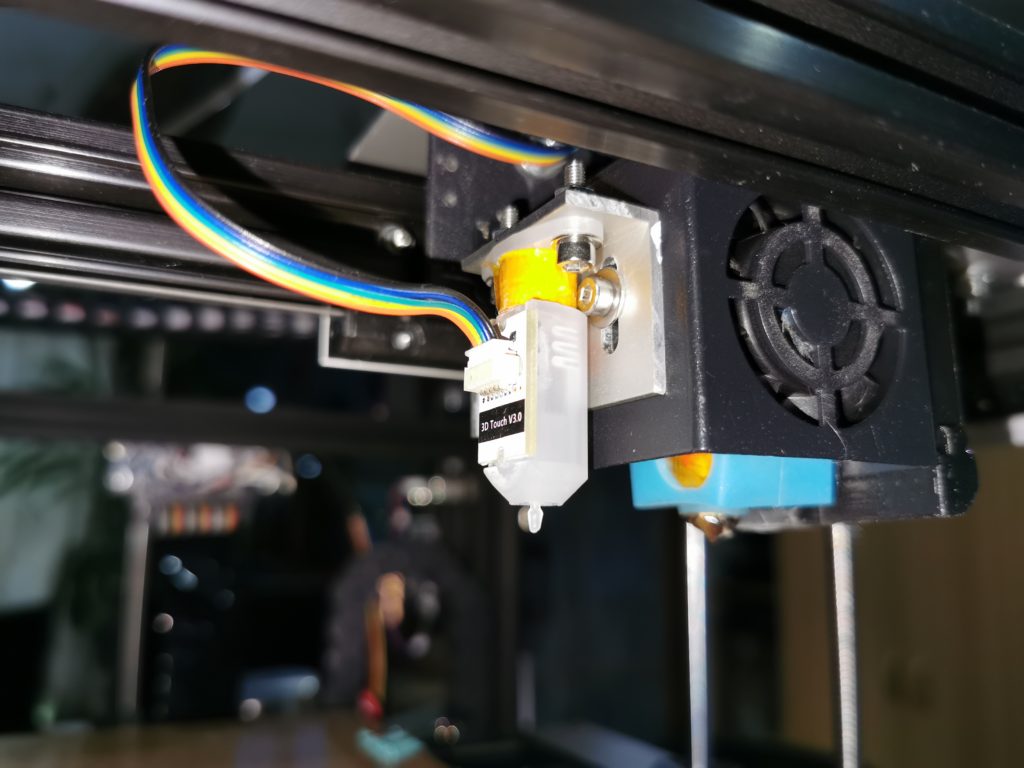
Es gibt unzählige Winkel und Adapter auf thingiverse und anderen Plattformen um den 3D Touch oder BL Touch an einen Drucker zu montieren. Da ich aber aktuell keinen davon drucken kann, habe ich schnell einen Halter aus einem Aluwinkel erstellt. Mit der Fräse geht das sehr schnell. Ohne Fräse ist vermutlich der Drucker die einfachere Wahl. Dass ich nicht drucken kann ist schnell erklärt: Der Tronxy ist zerlegt, – klar das zeige ich hier ja gerade und beim Ender 3 V2 komme ich noch nicht mit dem PETG-Druck klar. PLA ist noch im Zulauf.
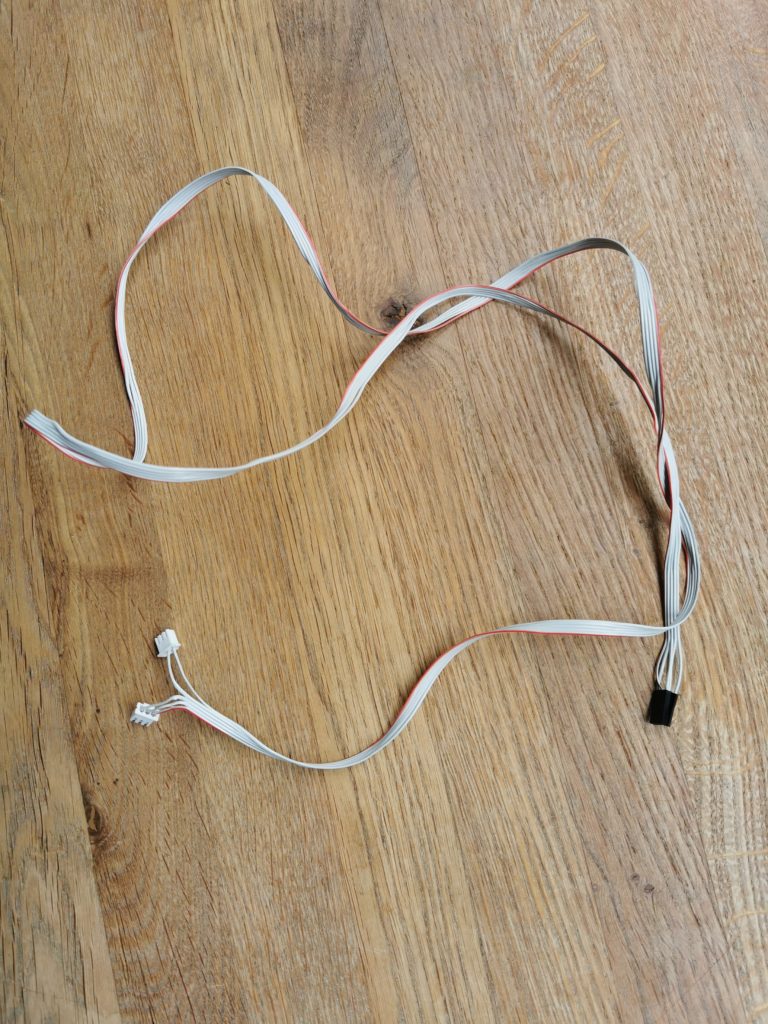
Meine Idee war es, die Kabel so zu adaptieren, dass ich möglichst viel der ursprünglichen Verkabelung nutzen kann. Das Hauptkabel des Tronxysensors konnte ich schonmal nicht nutzen, da es direkt mit dem Sensor verbunden ist. Das gesamte Bauteil wollte ich nicht zerstören. Das ursprünglliche Kabel für den XSTOP hätte ich auch umadaptieren müssen, – dann kann ich auch gleich ein neues 5-adriges Kabel vom Sensor bis zum hinteren oberen Schaltkasten konfektionieren.

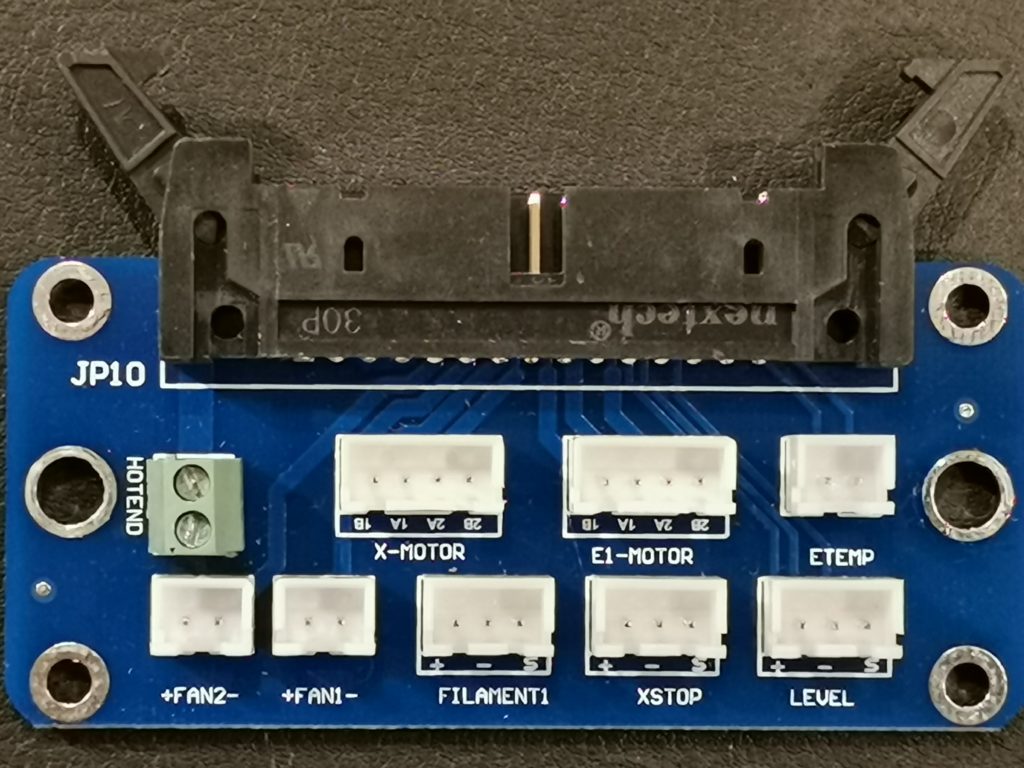
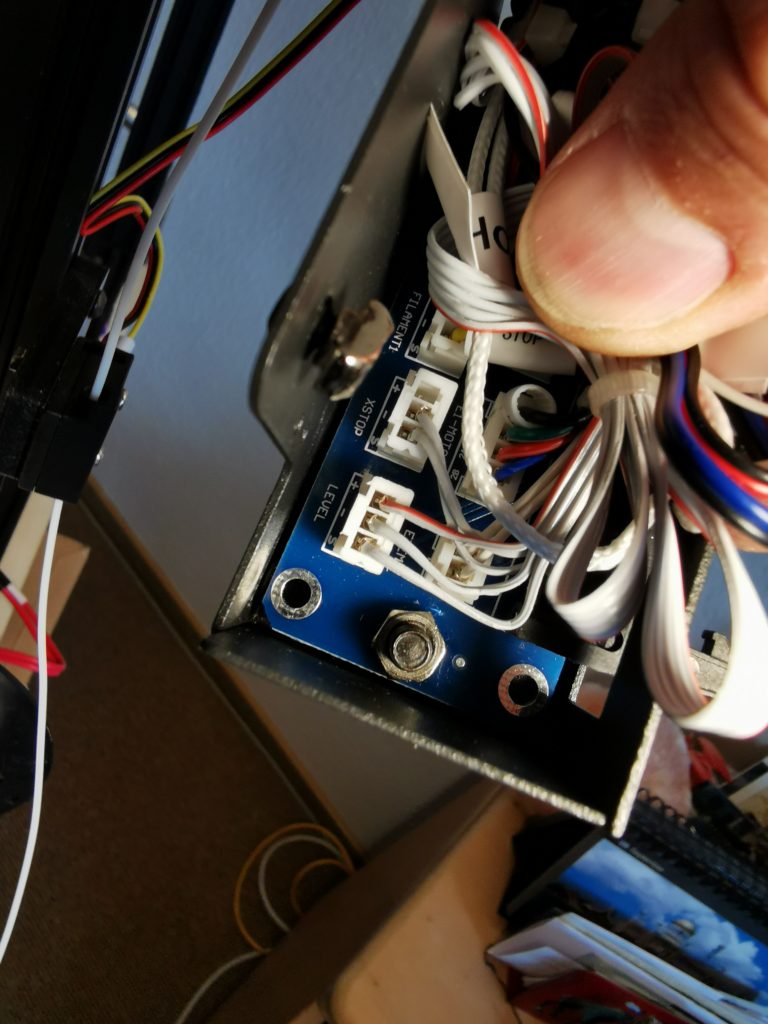
Ein ausreichend langes Flachbandkabel habe ich auf der einen Seite mit zwei Pfostensteckern (3polig und 2polig) bestückt und auf der anderen Seite mit zwei 3-poligen JST-Steckern (tw. auch Dupont-Stecker genannt). Ich habe mich dabei an der oberen kleinen Veteilerplatine orientiert, die per Flachbandkabel alle Signale nach unten in die Box mit der Druckerelektronik überträgt. Dort ist ja bekanntlich die gleiche Platine zur Rückübersetzung wieder vorhanden.
Bei dieser Gelegenheit habe ich mir auch gleich die gesamte Steckerbelegung ausgemessen.
Ein paar Eckpunkte:
Wie schon im oberen Bild erkennbar, belegt der Hotendanschluss die ersten 8 Anschlüsse.
FILAMENT1 und XSTOP teilen sich einen gemeinsamen + Anschluss.
Alle anderen Anschlüsse werden eins zu eins auf den Flachstecker übertragen.
Der XSTOP wird nicht mehr genutzt und der Anschluss LEVEL ist ebenfalls verwaist. Von XSTOP kann allerdings der +-Anschluss nicht genutzt werden. Das passt alles sehr gut. Ich habe den dreipoligen Anschluss vom Sensor auf den LEVEL-Stecker gelegt und den zweipoligen Anschluss auf den XSTOP, – aber eben nur auf – und S. Beim Anschluss habe ich darauf geachtet, dass die aufgedruckte Logik durchgehalten wird. GND, + und S sollten passen.
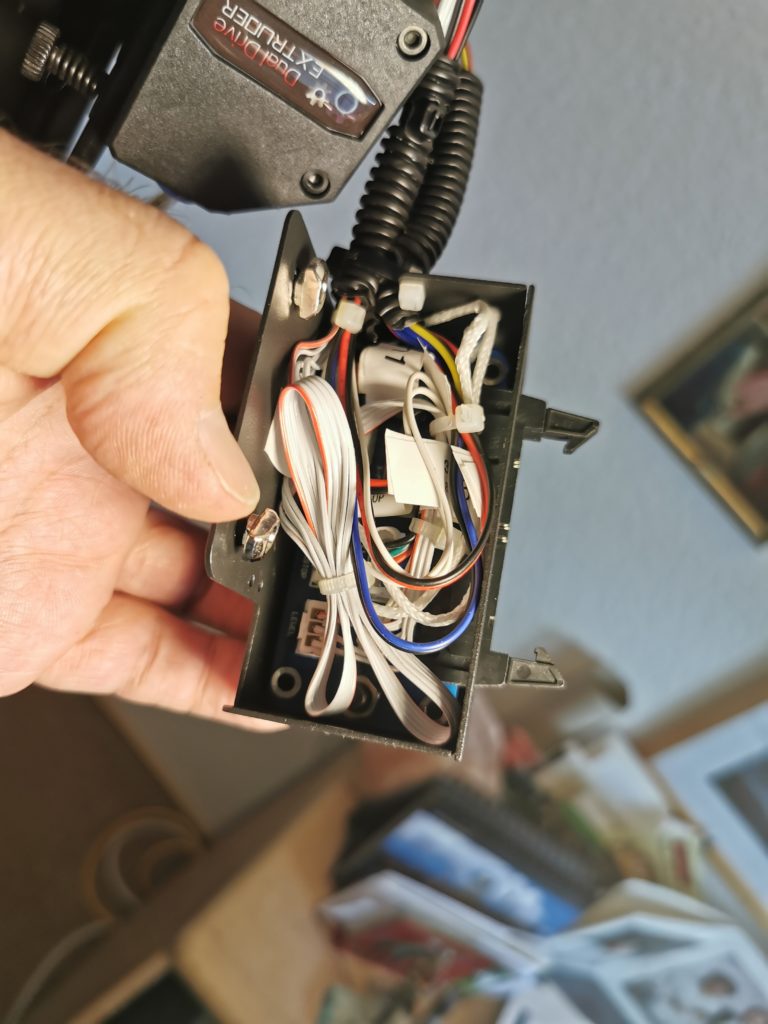
Das Kabel wurde jetzt durch die Energiekette gezogen, indem es an das herauszuziehende alte XSTOP-Kabel befestigt wurde. Etwas nachhelfen muss man trotzdem und außerdem darauf achten, dass man keine anderen Kabel beschädigt. Es ist übrigens wesentlich leichter die schwarzen flachen Stecker durch den Kanal zu ziehen als die würfelförmigen weißen Stecker.
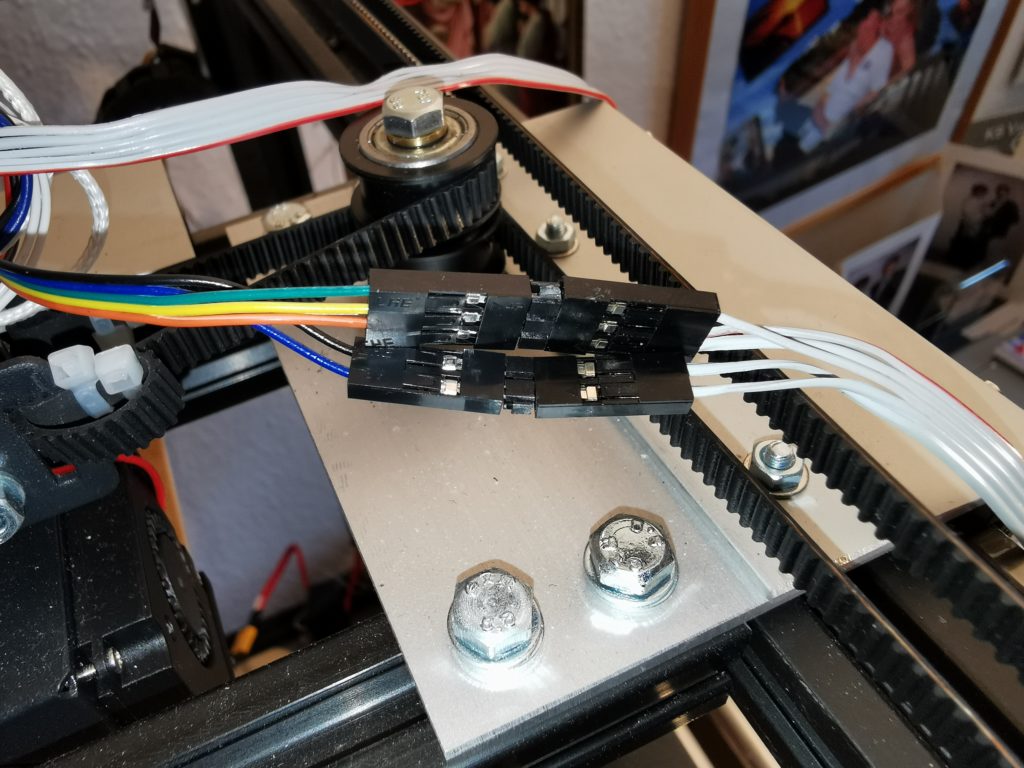
Diese Verbindung habe ich dann noch per Schrumpfschlauch gesichert.

Die neuen Stecker wurden gekennzeichnet …
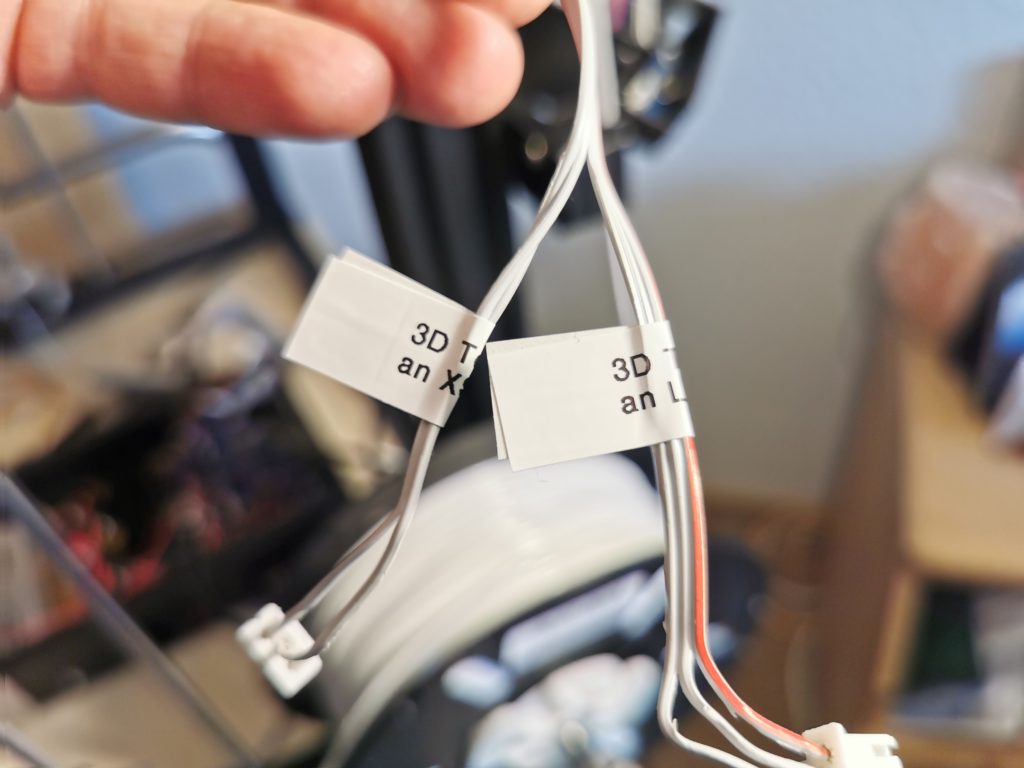

… und dann eingesteckt.
Der Versuch mit Kabelbindern eine gewisse Ordnung und Fixierung zu erreichen:
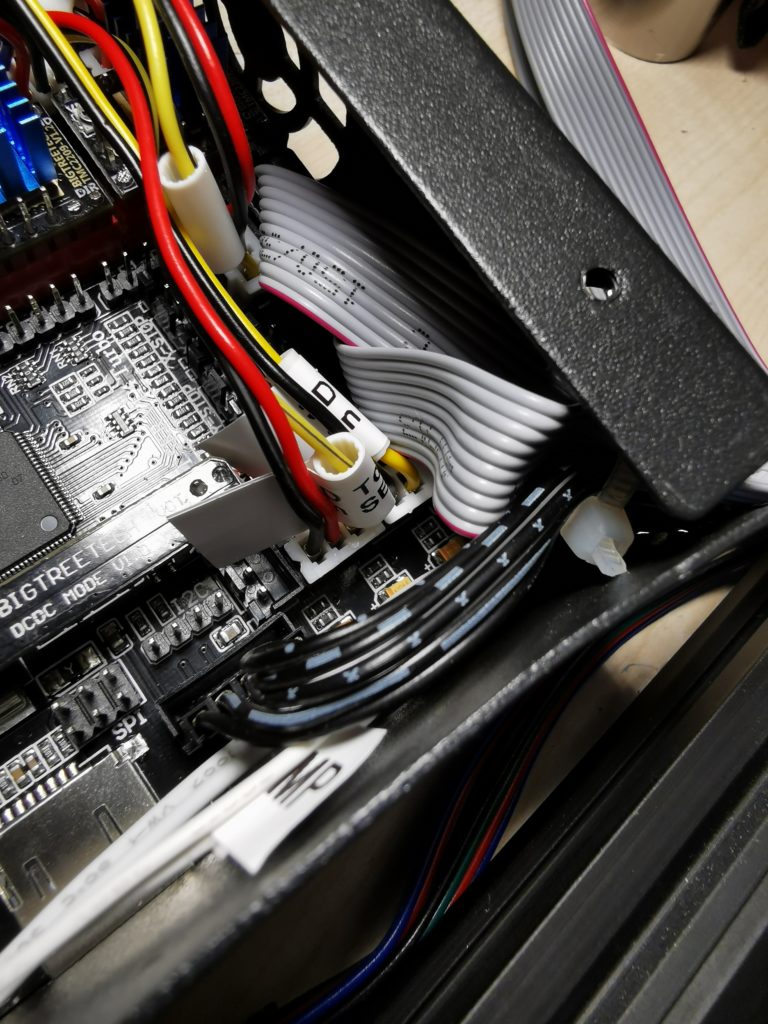
Es geht weiter mit den Arbeiten in der Elektronikbox. Dort findet sich die gleiche Platine für die Umsetzung vom Flachbandkabel auf die einzelnen Steckplätze. Wie schon oben, kommen natürlich auch hier die Anschlüsse LEVEL und XSTOP wieder zu Einsatz. Um nicht ständig umdenken zu müssen hatte ich ja darauf geachtet, dass die Beschriftungen passen. Hier verwende ich jetzt die originalen Kabel von der Verteilerplatine zum Motherboard, aber ein paar Änderungen müssen sein.
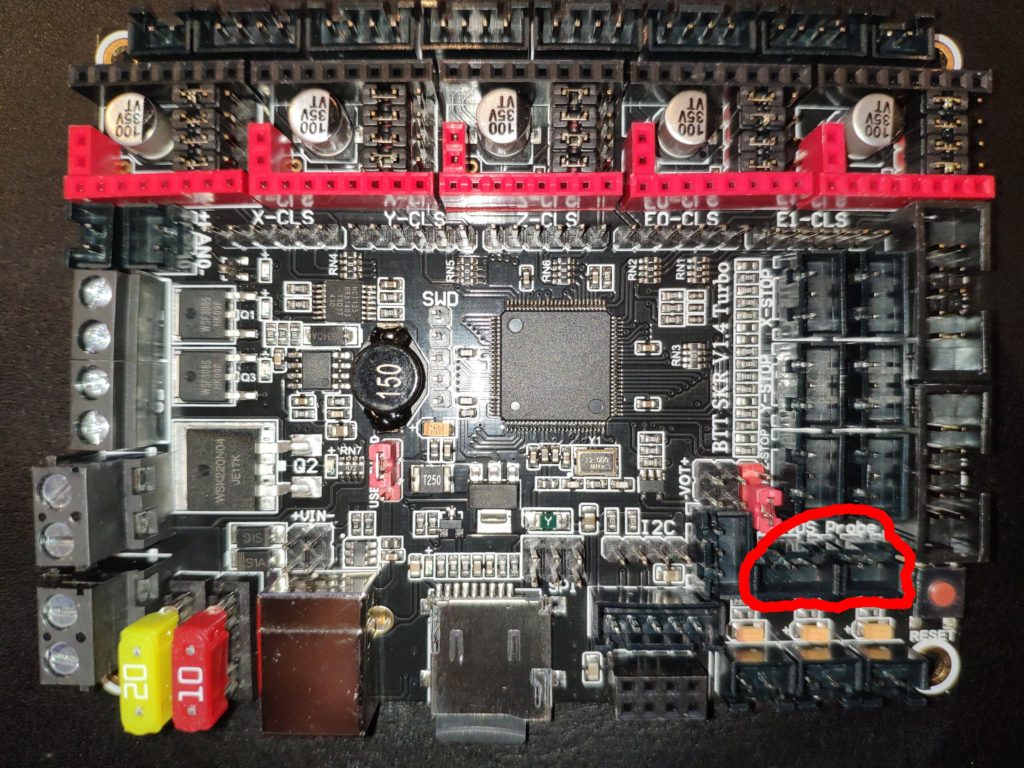
Unten rechts habe ich den Anschlussbereich rot markiert. Es sind zwei Steckplätze mit 3 bzw. 2 Polen.
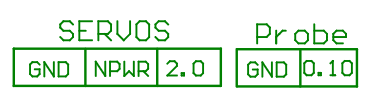
Das ursprüngliche LEVEL-Kabel geht jetzt auf den SERVOS-Anschluss. Das XSTOP-Kabel geht auf Probe. Dabei gibt es zwei Vorarbeiten zu erledigen. Die Reihenfolge im LEVEL-Stecker muss angepasst werden und beim XSTOP muss zusätzlich der 3er-Stecker in einen 2er-Stecker geändert werden. Jetzt zahlt sich aus, dass die Bezeichnung auf der Verteilerplatine logisch richtig ist. Die Farben des Kabels sind auch eindeutig, – zumindest sind sie es bei mir.
- ROT – + bzw. NPWR
- Schwarz – GND
- Gelb – S bzw. Signal
Es ist relativ einfach die Metallzunge aus dem Kunststoffblock des Steckers zu ziehen. Mit einem spitzen Gegenstand kann man über die kleinen Löcher die kleine Rückhaltefeder vorsichtig herunterdrücken und dann die Metallzunge herausziehen. Im entlasteten Zustand die Feder herunterdrücken und erst dann am Kabel ziehen. Macht man es richtig ergibt sich fast kein Widerstand beim Herausziehen.
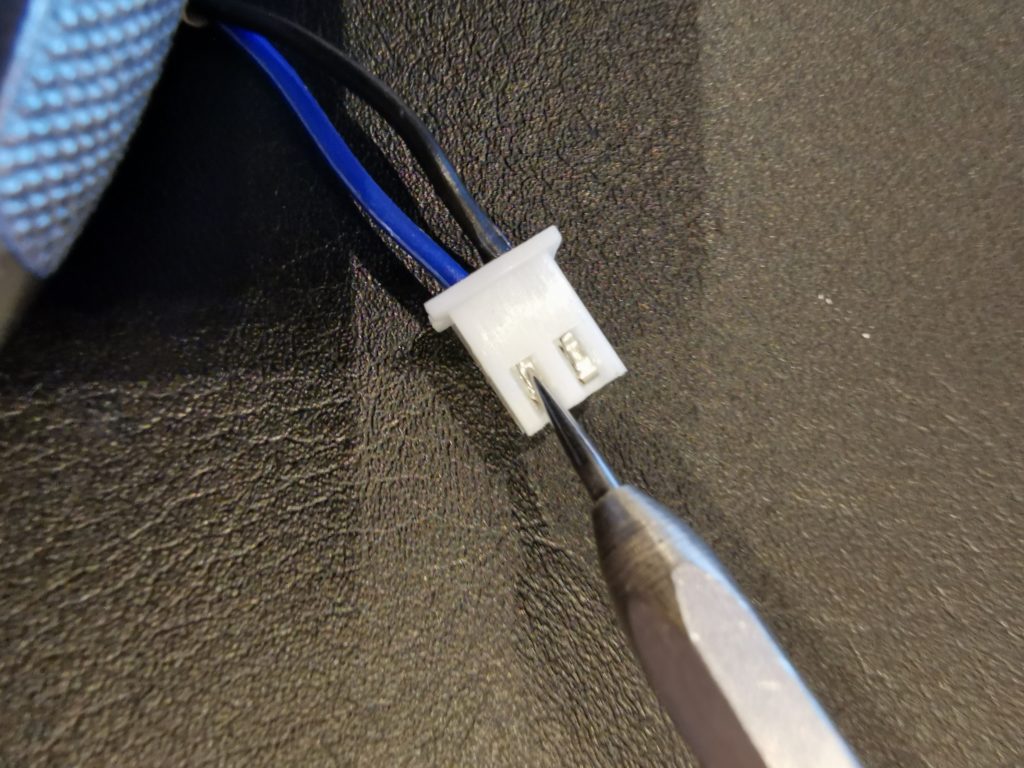
Vor dem Zusammenstecken in der neuen Reihenfolge sollten die kleinen Metallzungen kontrolliert werden. Sind die Rückhaltefedern zu weit eingedrückt, rasten sie nicht richtig ein und rutschen beim leichten Verdrehen sofort aus dem Stecker. Mit dem gleichen spitzen Gegenstand kann man die Rückhaltefedern vorsichtig wieder etwas aufrichten.
So wie im Bild oben sollte es dann aussehen. An anderer Stelle hatte ich schon darauf hingewiesen: Man sollte die einzelnen Stecker unbedingt bezeichnen. Sobald alles schön geordnet und mit Kabelbindern fixiert ist, kann man kaum mehr die Leitungen verfolgen und ist glücklich eine eindeutige Bezeichnung zu haben.
Das war jetzt aber nur die Arbeit an der Hardware. Jetzt muss noch die Firmware angepasst werden, damit der 3D Touch genutzt werden kann. Ich habe dazu einen hervorragenden Artikel bei 3dwork.io gefunden. Neben der Firmwareanpassung ist hier auch der Anschluss sehr gut beschrieben.
Die durchzuführenden Änderungen in der Configuration.h:
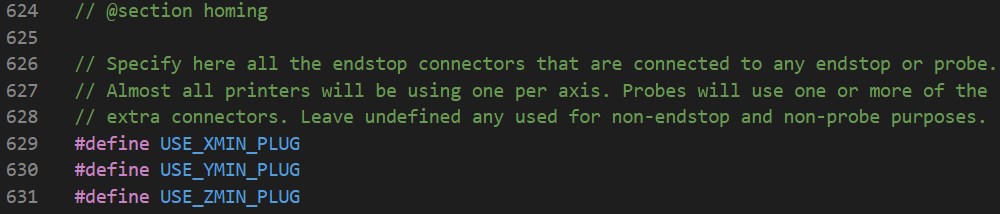
Das ist nichts Neues, aber sollte kontrolliert werden.

Die letzten beiden Zeilen müssen auf false gesetzt werden.

Es steht zwar an vielen Stellen anders, aber im Zusammenspiel mit dem SKR 1.4 Board und der Nutzung des speziellen PROBE-Anschlusses ist diese Option zu deaktivieren.
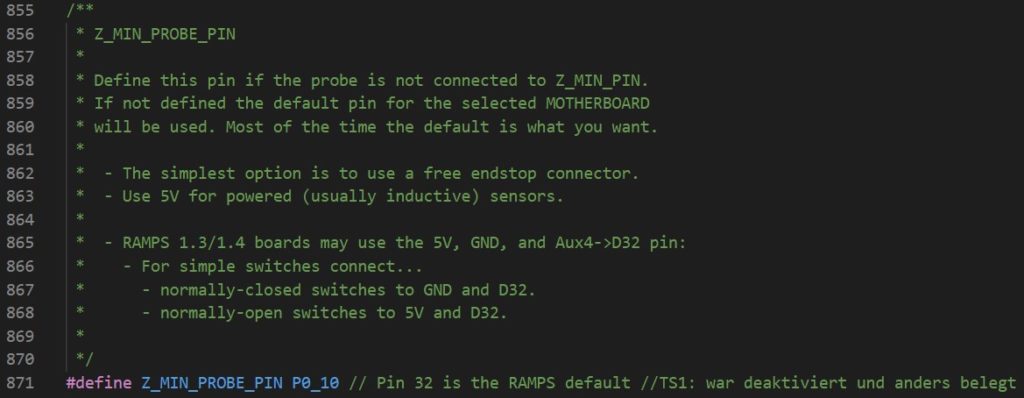
… dafür muss der Pin 0.10 aktiviert werden. Es gibt auch eine andere Methode, indem man in der Boardbeschreibungsdatei diesen PIN anders zuordnet, aber so finde ich es einfacher.

FIX_MOUNTED_PROBE habe ich abgeschaltet.

Marlin kennt keinen Unterschied zwischen BL Touch und 3D Touch. Die Option muss natürlich eingeschaltet werden.
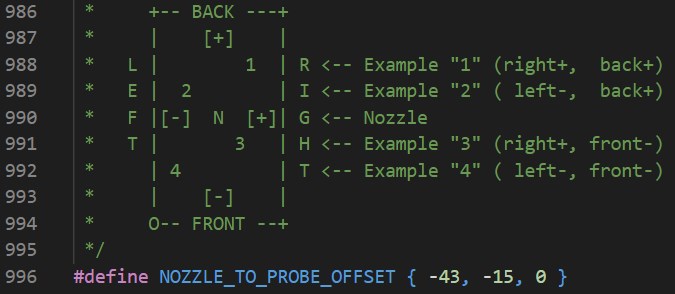
Die Position des 3D Touch Sensorstiftes muss hier angegeben werden. Bei mir liegt diese Postion 43mm links (negative X-Richtung) und 15mm vor (negative Y-Richtung) der Nozzle. Die Höhe lässt sich später direkt per Display anpassen, wie übrigens die X- und Y-Werte auch.

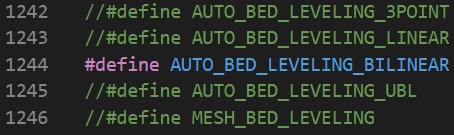
Für das Leveln über das G29-Kommando muss Marlin die Strategie vorgegeben werden. Hier wird BILINEAR gewählt.

Hiermit wird sichergestellt, dass G28 den Level-Status erhält und nicht verwirft.

Mit der Anweisung GRID_MAX_POINTS_X wird die Anzahl der Testpunkte festgelegt. Der Wert wird in der nächsten Zeile auch für die Y-Richtung übernommen. Bei der gezeigten Konfiguration entstehen also 9 Testpunkte.
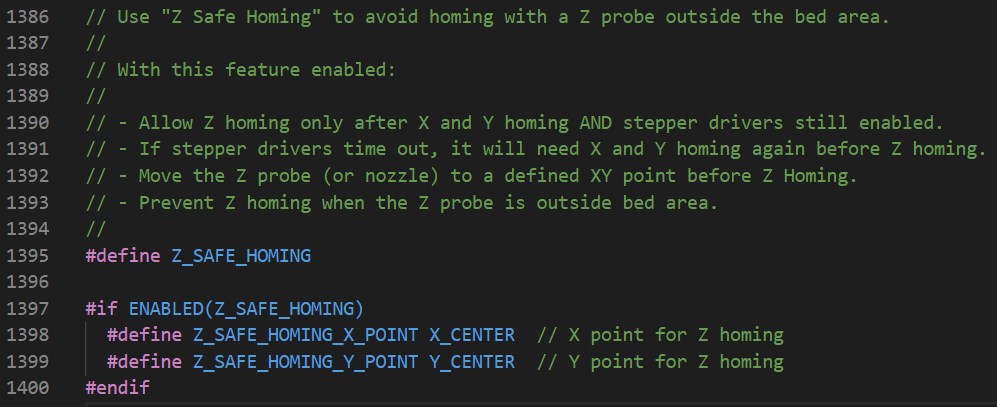
Um zu verhindern, dass außerhalb des Druckbettes getestet wird, legt man hier die Bed-Mitte fest. Ich gehe davon aus, dass ich das noch manuell nachschärfen muss, um der Firmware mitzuteilen, dass aufgrund des Umbaus die Lage bei mir abweicht. Das macht man ein paar Zeilen höher:

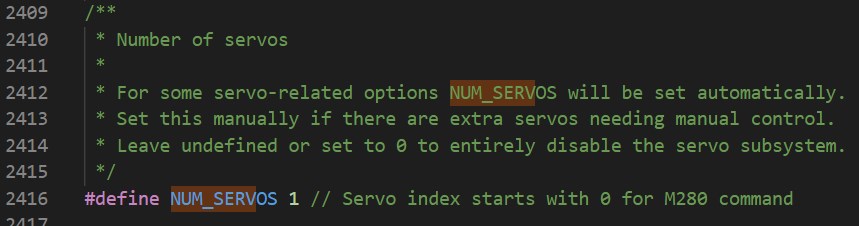
Ein weiterer Punkt sorgt dafür, dass der 3D Touch auch über die M280-Kommandos erreichbar ist. Dafür muss nämlich die Servo-Nummer definiert werden. Beim SKR 1.4 ist das etwas abweichend definiert.
Für die Configuration.h war es das fürs Erste.
Weiter geht es mit der Configuration_adv.h
BABYSTEPPING ist die Einstellung um die ich mich hier kümmere. Diese Einstellung erlaubt eine winzige Veränderung einer Position ohne die Positionsdaten zu verändern. Beispiel: Ich fahre die Position 0,0,0 an. Dann fahre ich die Z-Achse zwei Millimeter hoch. Ohne Babystepping ist die neu Position dann beispielsweise 0,0,2. Mit Babystepping bleibt sie bei 0,0,0. Diese Fähigkeit benötigt man, um die erste Messung des Düsenabstands in der Mitte des Beds einzustellen. Babystepping kümmert sich übrigens nicht um die Endstopps.
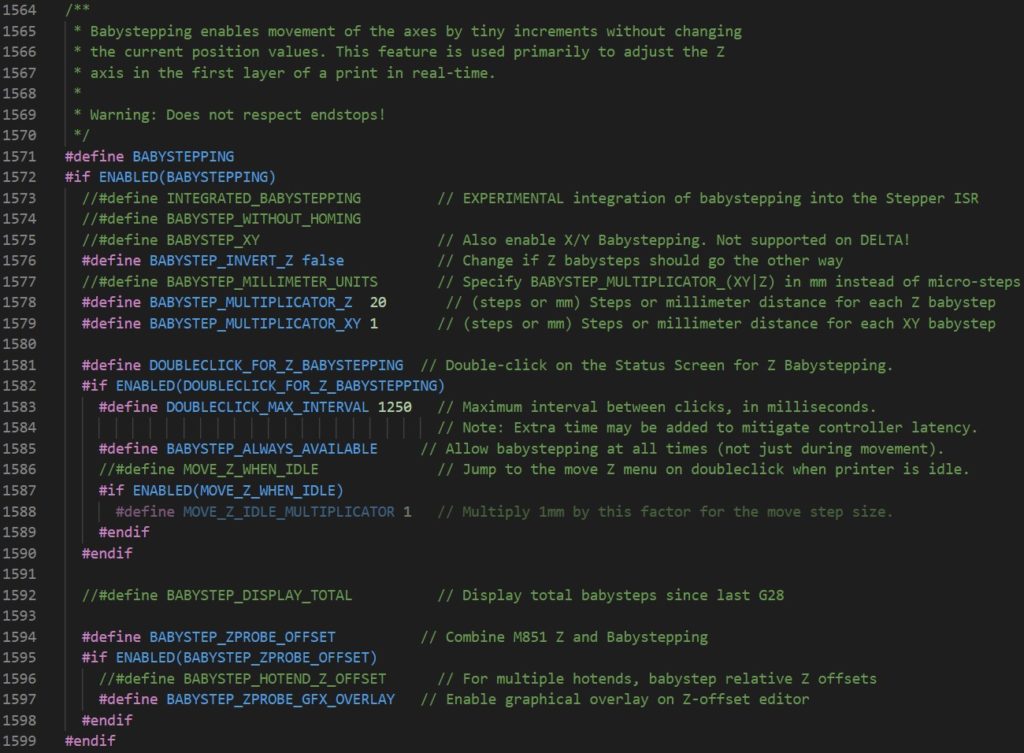
Der Abschnitt ist ziemlich lang und enthält einige Definitionen, die eingeschaltet werden müssen. Bitte genau anschauen.
Mit den oben genannten Einstellungen allein gelang es mir nicht ein Z-Homing durchzuführen. Beinahe wäre sogar mti 3D Touch zerstört worden, weil der Druckkopf nicht stoppen wollte. Es ist noch eine zusätzlich Änderung in der Conditionals_LCD.h notwendig, die man im Pfad Marlin/src/inc findet:
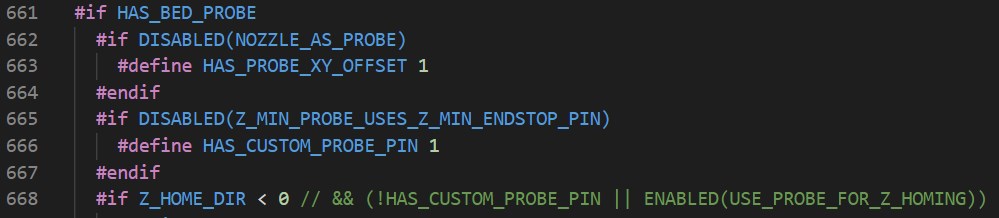
Es geht um die letzte Zeile. Der Code in der Zeile scheint im Widerspruch zur restlichen Konfiguration zu stehen und deshalb muss der hintere Teil auskommentiert werden.
Mit diesen teilweise neuen Einstellungen in den beiden Konfigurationsdateien wird eine neue Firmware erzeugt und dann auf das Motherboard geladen.
Sofern jetzt alles richtig verdrahtet wurde und die SD-Karte mit der neuen Firmware im Motherboard SKR 1.4 steckt, wird man beim Einschalten einen Test des 3D Touch erleben: Er fährt den Teststift mehrfach aus und ein. Jetzt kann auch im „Movement“-Menü unter „ABL“ die Funktion getestet werden.


Mit „Deploy“ wird der Stift ausgefahren und mit „Stow“ wird er wieder eingefahren. Die Testroutine vom Start kann man mit „Test“ einleiten. Erst ein weiteres Kommando beendet den Test.
Soweit zum Aufbau und zur Integration des 3D Touch. In einem weiteren Beitrag geht es dann um das Finetuning der Firmware und die Nutzung.
Mit dem geschilderten Aufbau und den Anpassungen der Firmware war ich in der Lage den 3D Touch sowohl für das Z-Homing als auch für seine eigentliche Aufgabe der Vermessung des Druckbettes zu nutzen.
Da ich jetzt schon mehrfach nach den modifizierten Dateien gefragt wurde, hänge ich die hier zum Download dran. Das einfache direkte Nutzen dieses Archivs wird aber nicht helfen, da mein Drucker infolge der Umbauten eine andere Geometrie hat. Außerdem müssen alle Anschlüsse genau so erfolgen, wie ich es gemacht habe.