
Noch ein paar wenige Jumper sind zu setzen und dann geht es an das Anschließen der Druckerkomponenten.
Der letzte Beitrag dieser Serie befasste sich speziell mit den Treibern und deren Konfiguration auf dem OctopusPro-Board. Es gibt noch ein paar weitere Jumper, über die man sich Gedanken machen muss.
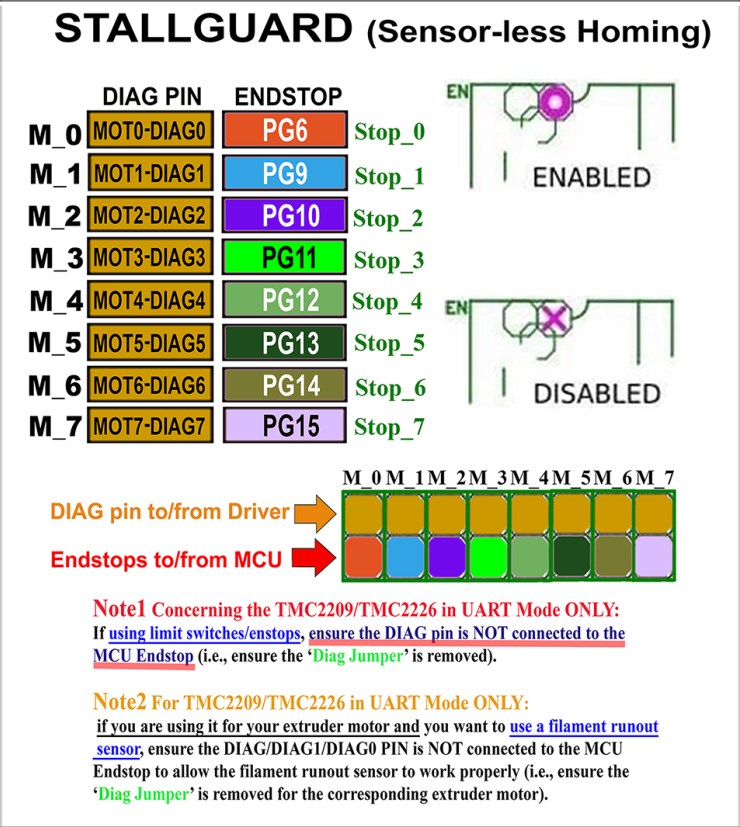
Da wäre zum Einen das Thema Stallguard oder auch sensorless homing. Hier wird die spezielle Eigenschaft u.a. des TMC2209 genutzt, selbst den Endanschlag zu ermitteln. Prinzipiell geht das über eine Erhöhung des benötigten Stroms, den der Stepper in diesem Moment fordert. Die Information darüber wird über den DIAG-PIN ausgegeben. Da üblicherweise ein mechanischer oder optischer Endstopp angeschlossen wird um den Endanschlag zu ermitteln, muss man bei der Stallguard-Variante erreichen, dass der DIAG-PIN mit dem entsprechenden Prozessorausgang verbunden wird. Dafür gibt es eine Reihe von Jumperplätzen auf dem Board. Aus Platzgründen ist die Beschriftung auf der Platinenunterseite angebracht. Aber eigentlich braucht man das nicht, da die Plätze identisch von 0 bis 7 wie die Treiber selbst angeordnet sind.
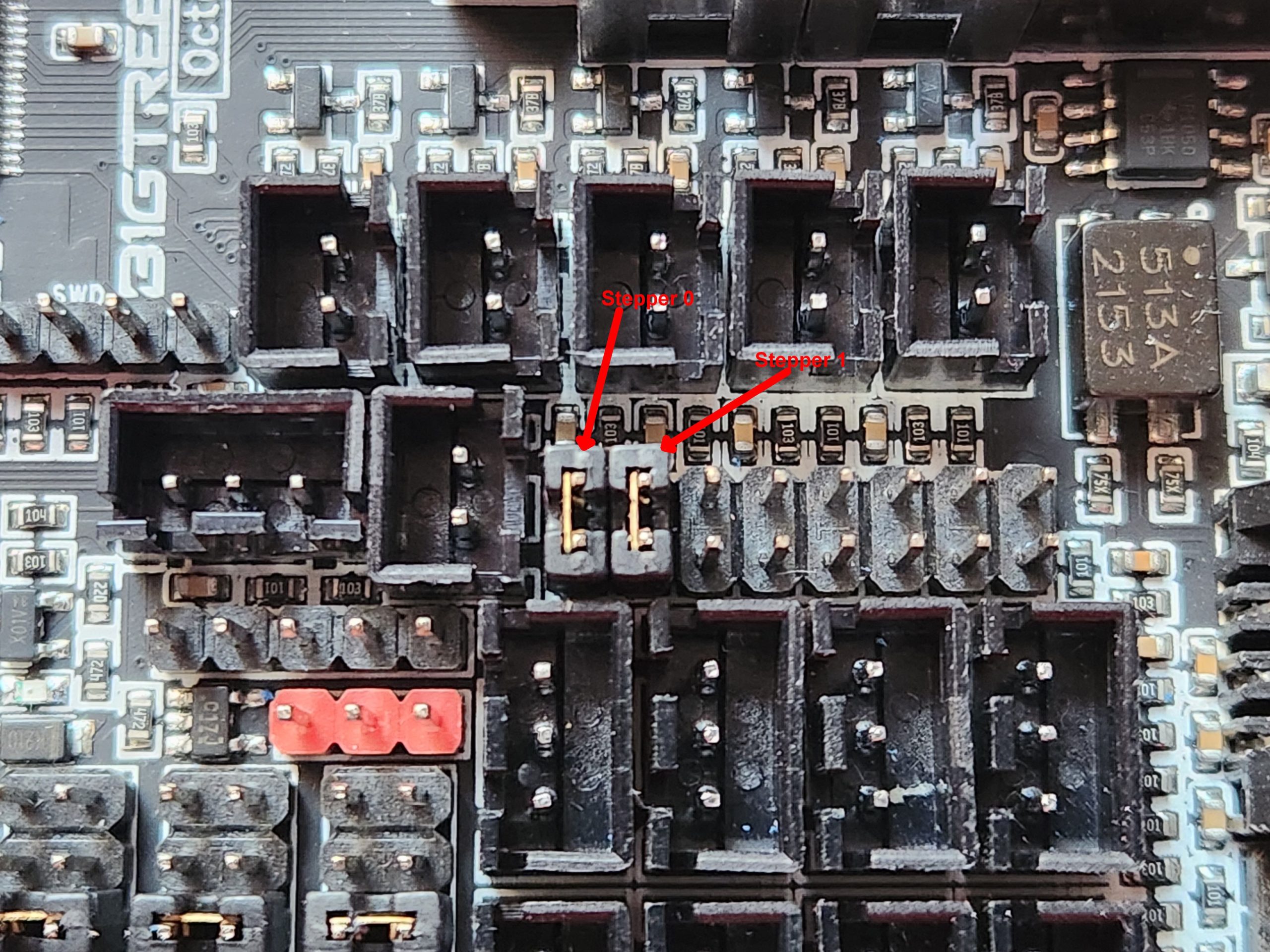
Ich benutze Stallguard bzw. sensorless homing nur in der Ebene, – also für X und Y. Die beiden werden an den Treiber 0 und 1 angeschlossen. Folgerichtig werden hier auch nur die ersten beiden Jumper gesetzt. Im Auslieferungszustand ist kein Jumper gesetzt.
Im obigen Bild sind noch ein paar wichtige Hinweise zu finden.
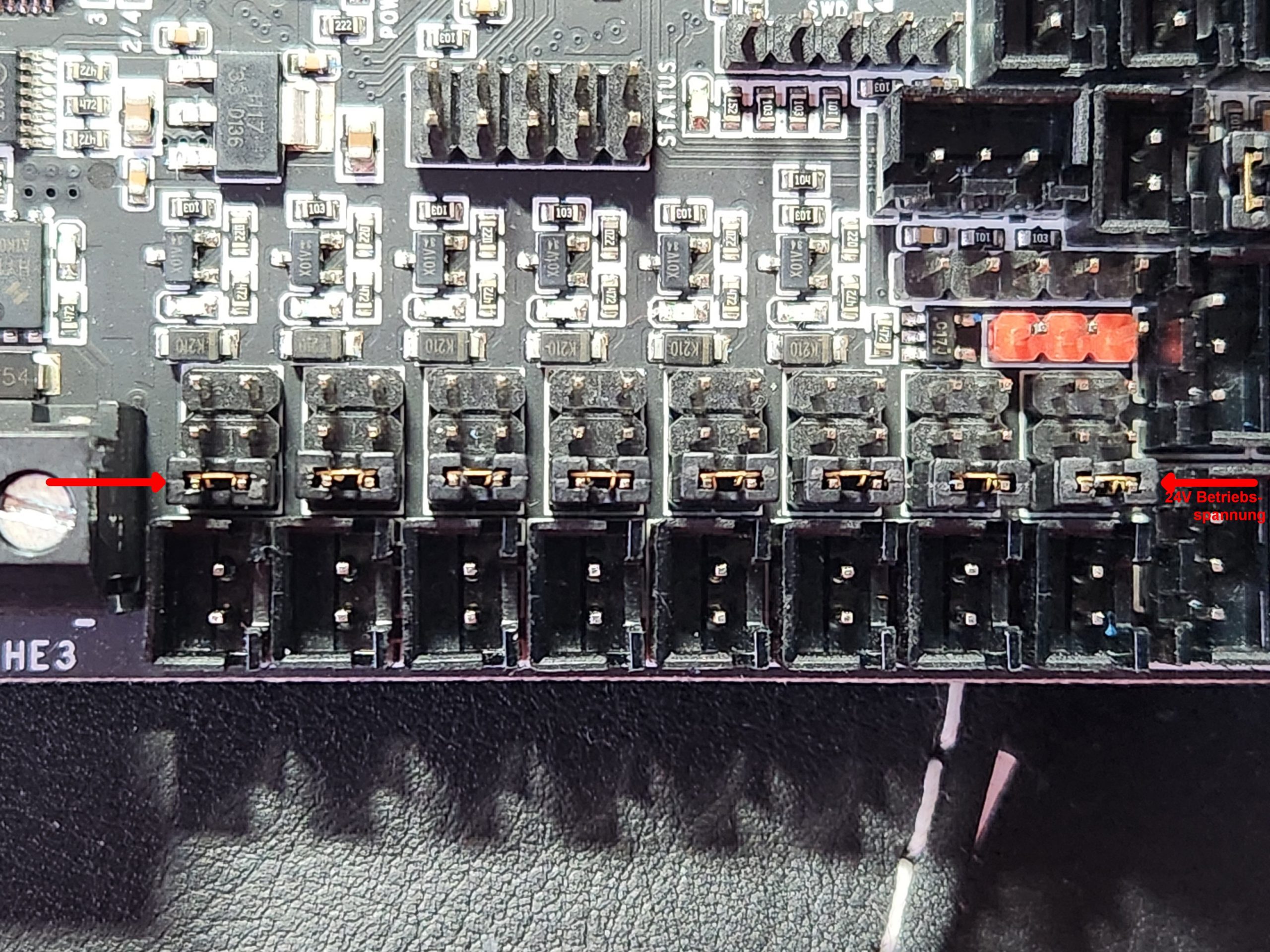
Das Board bietet auch für die Lüfter die Möglichkeit auszuwählen, welche Spannung genutzt werden soll. Hier geht es nicht darum, dass man wie bei den Treibern eine eigene Stromquelle nutzen könnte. Vielmehr erzeugt das Board selbst aus den 24V Betriebsspannung die eventuell notwendigen 12V oder 5V. Da wir hier ein wahres „Luxusboard“ haben, kann man das natürlich für jeden Lüfter individuell festlegen. Ich nutze durchweg 24V-Lüfter, – zumindest ist das aktuell der Plan. Auch bei den hier zu setzenden Jumpern ist auf der Rückseite der Platine aufgedruckt, welcher Jumper zu welcher Spannungseinstellung gehört.
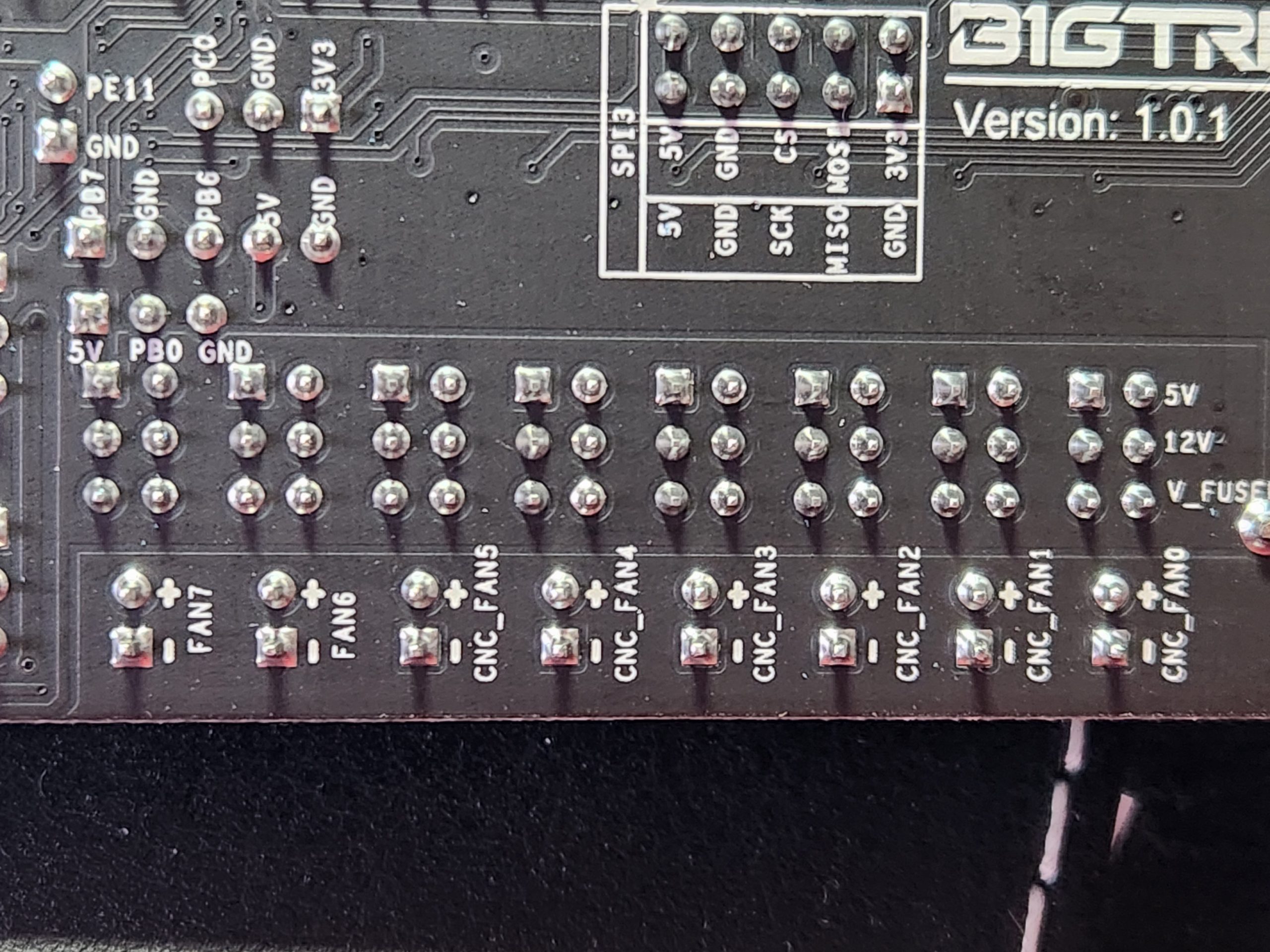
Hier ist auch ersichtlich, welches der Plus- bzw. GND-PIN des Lüfteranschlusses ist.
Eine weitere Einstellung betrifft den Temperatursensor für Hotend und Heizbett. Üblicherweise haben wir im 3D-Druckerbereich PT100-Typen mit 2-Drahtverbindungen verbaut. Das ist auch bei meinem Tronxy so. In dem Fall muss überhaupt nichts verändert werden. Sollte jedoch ein PT1000-Typ genutzt werden oder gar 3-Draht oder 4-Draht Typen muss angepasst werden.

Vorsicht! Das obige Bild ist eigentlich nicht ganz in Ordnung bezüglich der Stellung der Schalter. Hier stehen sie alle auf „ON“. Das hat bei mir problemlos funktioniert, aber eigentlich ist es falsch. Danke an Jürgen (siehe Kommentare) für seinen wertvollen Hinweis. Ich habe es jetzt bei mir geändert.
Unter der bernsteinfarbenen Abdeckung müssen die Schalter umgesetzt werden gemäß folgender Tabelle:
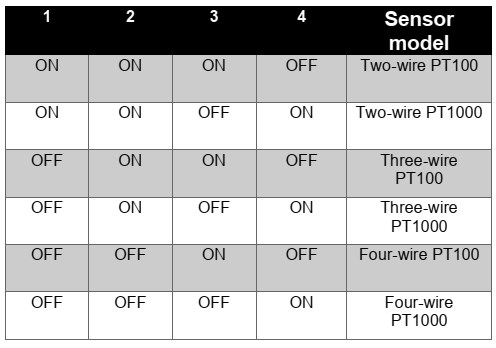
Und zusätzlich muss bei einem 3-Draht-Typ noch die 0 Ohm-Brücke auf der Platine umgelötet werden. Selbst der Hersteller gesteht ein, dass das nicht jedemanns Sache ist und gibt an, dass es auch eine simple Drahtbrücke tut.
Bezüglich Konfiguration mit Jumpern und Schaltern war es das auch schon. Im nächsten Schritt geht es weiter mit dem Anschließen der Komponenten.
Oben steht
>> Üblicherweise haben wir im 3D-Druckerbereich PT100-Typen mit 2-Drahtverbindungen verbaut. Das ist auch bei meinem Tronxy so. In dem Fall muss überhaupt nichts verändert werden. <<
Auf dem Foto sieht man sieht man jedoch, das die Jumper alle auf „ON“ stehen.
Nr. 4 steht nicht auf „OFF“ wie es für 2 wire PT100 angegeben ist. Und das funktioniert trotzdem?
Hallo Jürgen,
danke für den Hinweis. Ich bin jetzt endlich mal dazu gekommen das bei mir nachzusehen. Und tatsächlich: Bei mir stehen genau wie auf dem Foto alle Schalter auf „ON“. Funktioniert hat es trotzdem. Jetzt habe ich es aber gemäß Tabelle richtig gesetzt. Die Tabelle weist interessanterweise die Konfiguration 4 mal „ON“ gar nicht aus. Vielleicht ist es wirklich egal.