
Ich weiß: Das hat jetzt lang gedauert. Eigentlich habe ich immer noch nicht so richtig Zeit, aber es soll weitergehen. In diesem Beitrag fange ich an die Hardware aufzubauen.
Wie bei Tronxy üblich steckt die ganze Steuerelektronik in einer schwarzen Blechkiste, aus der seitlich das Netzteil herausragt. War beim alten Tronxy die Steuerkiste noch beidseitig von außen mit einem Flachbandkabel verbunden, das man ausstecken konnte, sieht es beim neuen PRO anders aus. Man kann immer noch oben am Rahmen an der Verteilerkiste das Flachbandkabel ausstecken ohne die Kiste öffnen zu müssen. Die unten verbaute Steuerkiste hat die dafür notwendige Adapterplatine aber leider eingebüßt. Der Stecker des Flachbandkabels geht direkt auf die Hauptplatine. Somit kann der Stecker an dieser Seite nur noch nach Öffnen der Box gelöst werden.
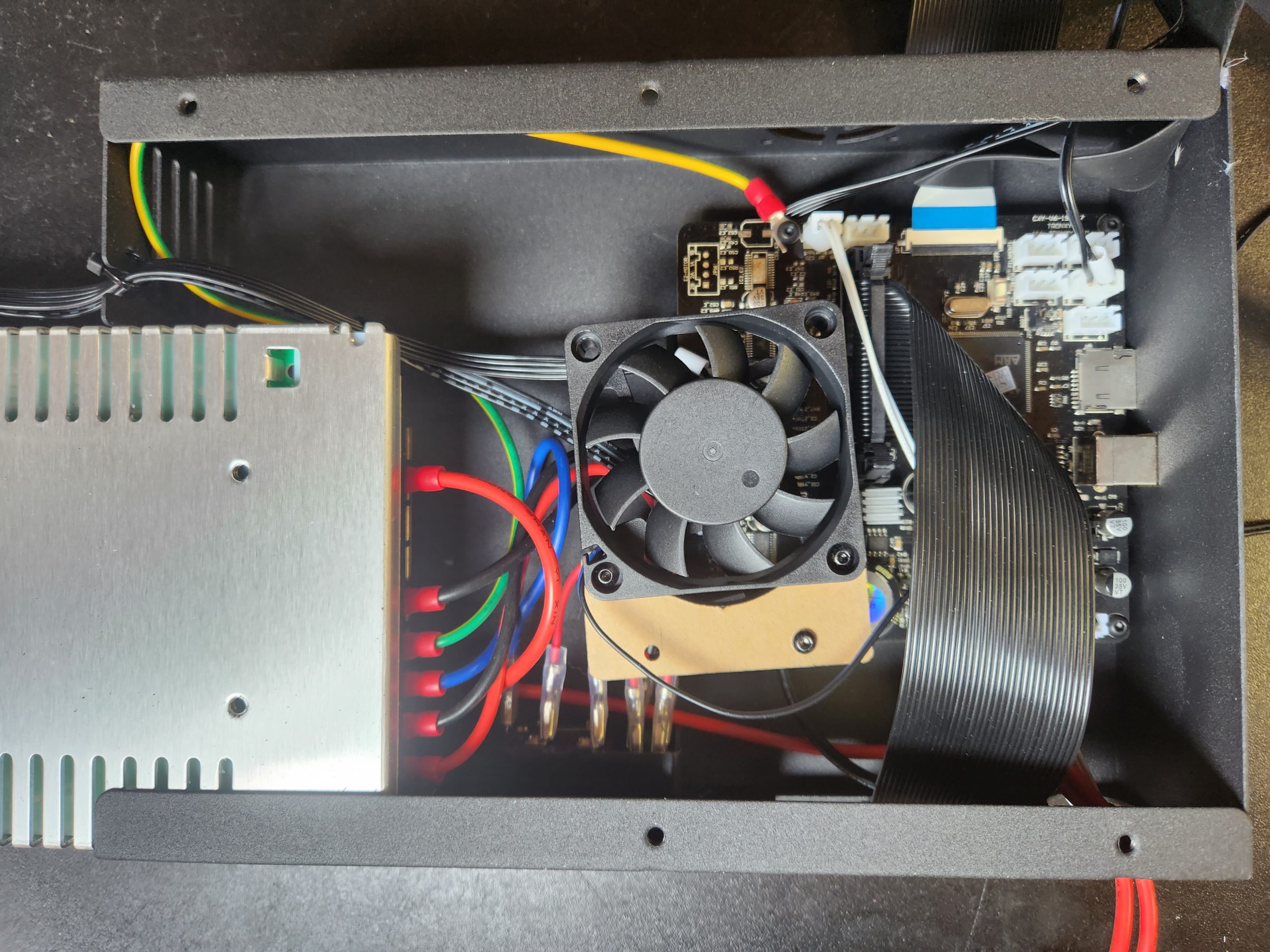
Zudem ist die Befestigung des kleinen Lüfters schon als innovativ (im negativen Sinne) anzusehen. Der Lüfter ist mit zwei Schrauben an einem Kunststoffträger befestigt. Dieser Kunststoffträger ist über einen Abstandshalter zusammen mit der Hauptplatine auf einen Sockel in der Box geschraubt.
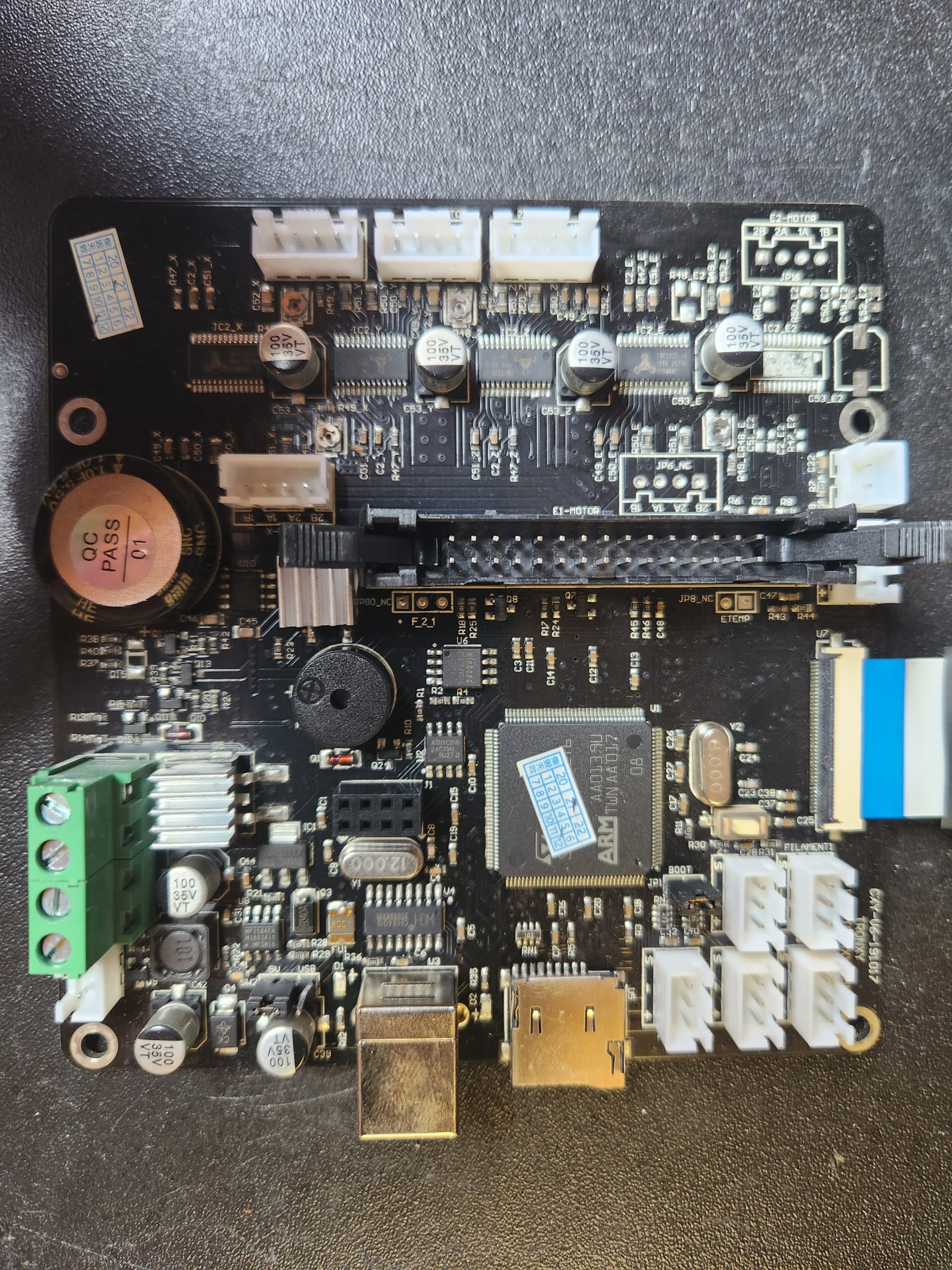
Ein paar Anschlussmöglichkeiten bietet die Tronxy-Platine dann neben dem Flachbandstecker doch noch, teilweise aber ohne Bestückung.
Ich hatte beim Umbau des kleineren Tronxy die Steuerplatine wieder in das Blechgehäuse eingebaut. Dabei war vieles umzubauen und richtig zufrieden war ich nie. Ich habe auch diesmal überprüft, ob die Octopus-Platine irgendwie sinnvoll passen würde. Eine gute Variante fand ich allerdings nicht. Eine neue Box muss her.
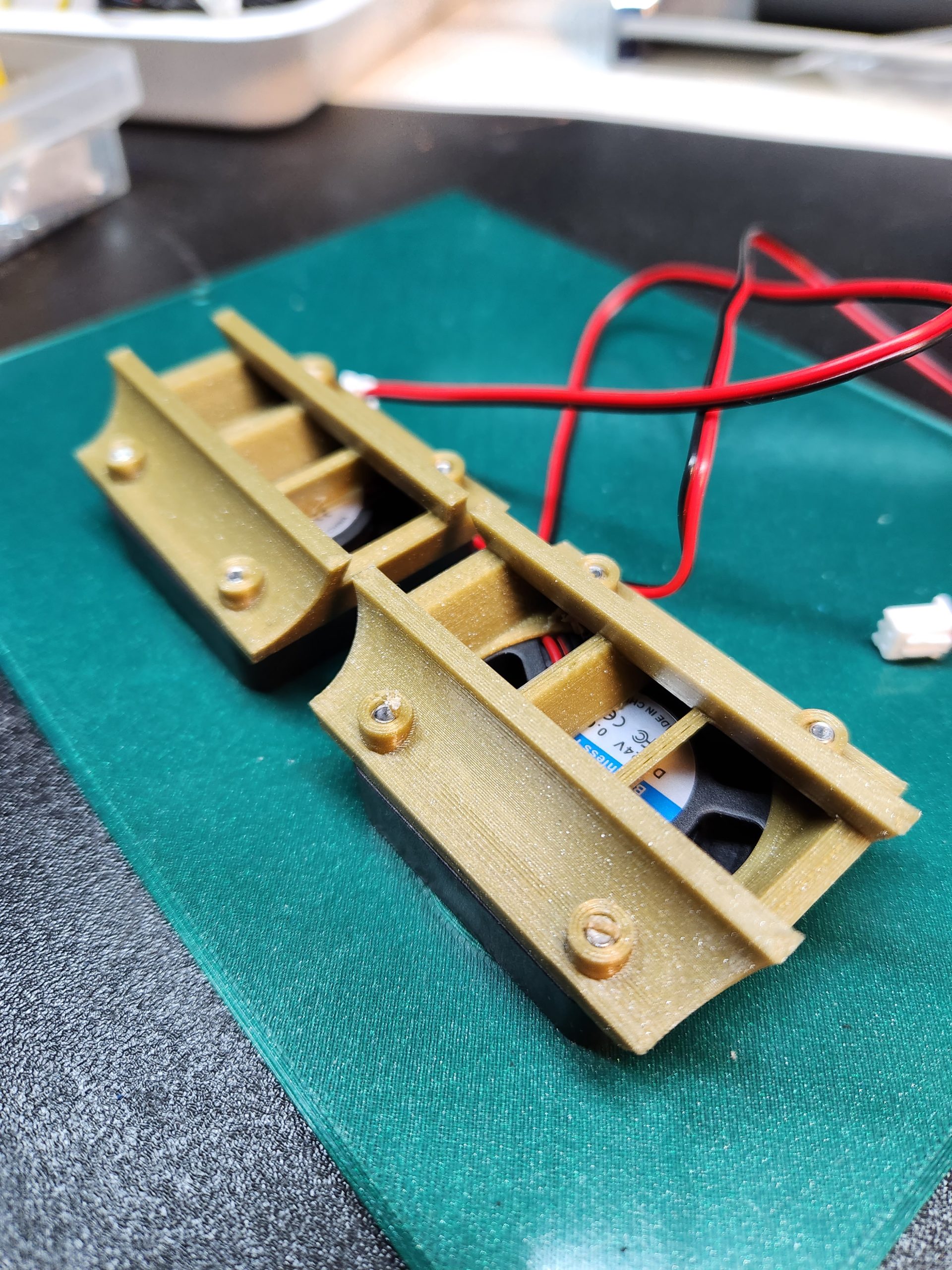
Es ist schon erstaunlich, wieviele Maker sich mit diesem Problem befasst haben, denn auf thingiverse findet man diverse Entwürfe. Zu meinen Bedürfnissen passt diese Box ganz gut:
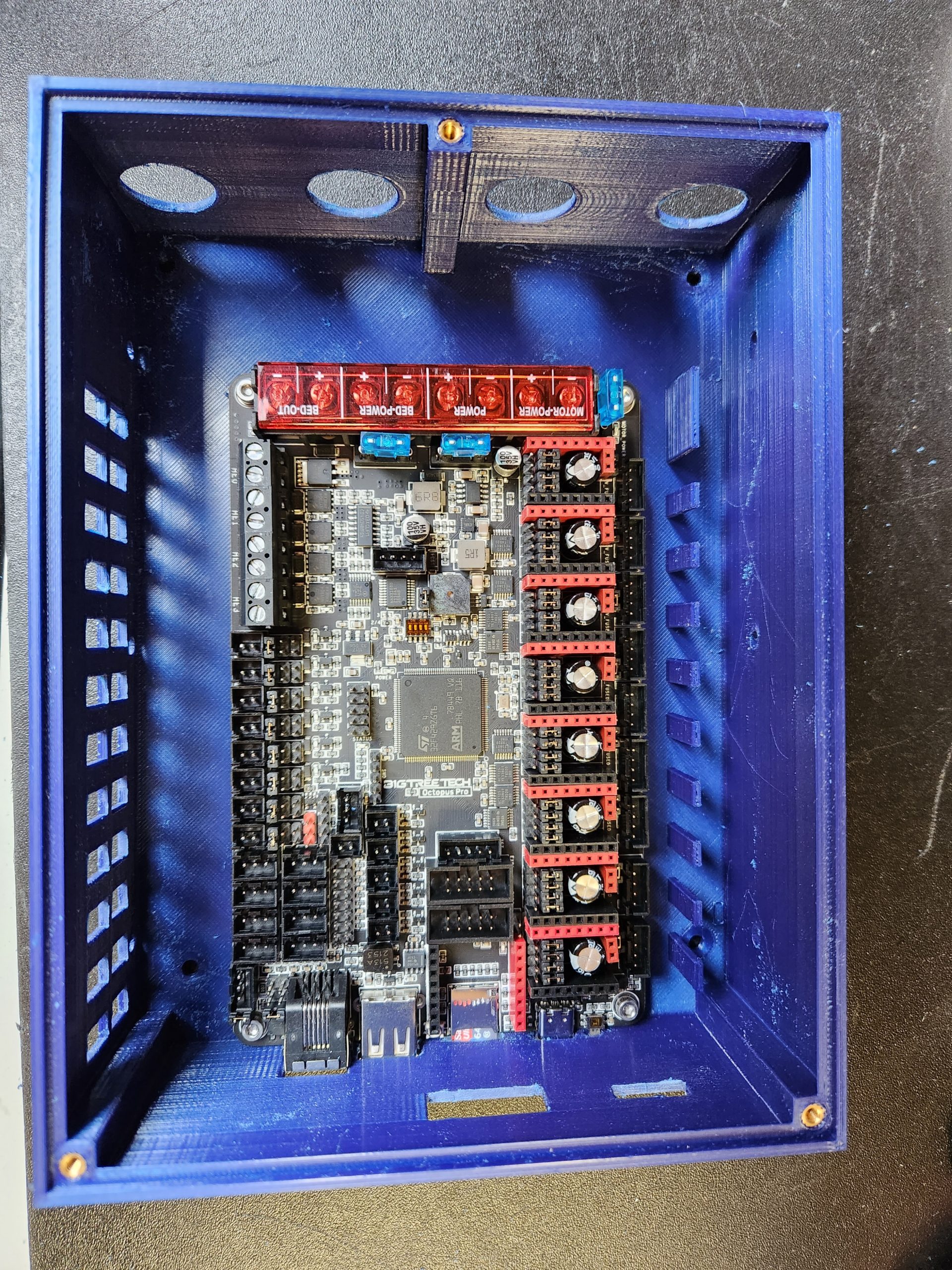
Die beiden Löcher im Deckel nehmen jeweils einen 40mm-Lüfter auf. Zudem ist eine Luftführung vorgesehen, um direkt auf die Treiber zu blasen.
Für die sichere „Verpackung“ des Netzteils habe ich leider nichts gefunden. Meist war es die bei mir verbaute Kombination aus Kaltgerätesteckplatz, Schalter und Sicherungshalter die nicht passend war. Also habe ich selbst etwas konstruiert. Dabei habe ich dann auch gleich einen Messfehler gemacht, – aber egal: Es geht!


Auch wenn das nicht unbedingt normgerecht ist, habe ich ein NYM 3×1,00mm-Kabel genommen um die Gleichspannung aus dem Netzteil herauszuführen.
Jetzt soll es um die Hardwarekonfiguration des OctopusPro-Boards gehen. Ich gehe mal streng nach Anleitung von Bigtreetech vor.
Vor dem Einstecken der Treiberchips sind einige Jumper unter den Steckplätzen der Chips zu konfigurieren. Wenn die Treiber eingesetzt sind, geht das nicht. Man kann übrigens sehr viele weiterführende Informationen zu den einzelnen Treibertypen im Bigtreetech-GitHub unter dieser Adresse erhalten.
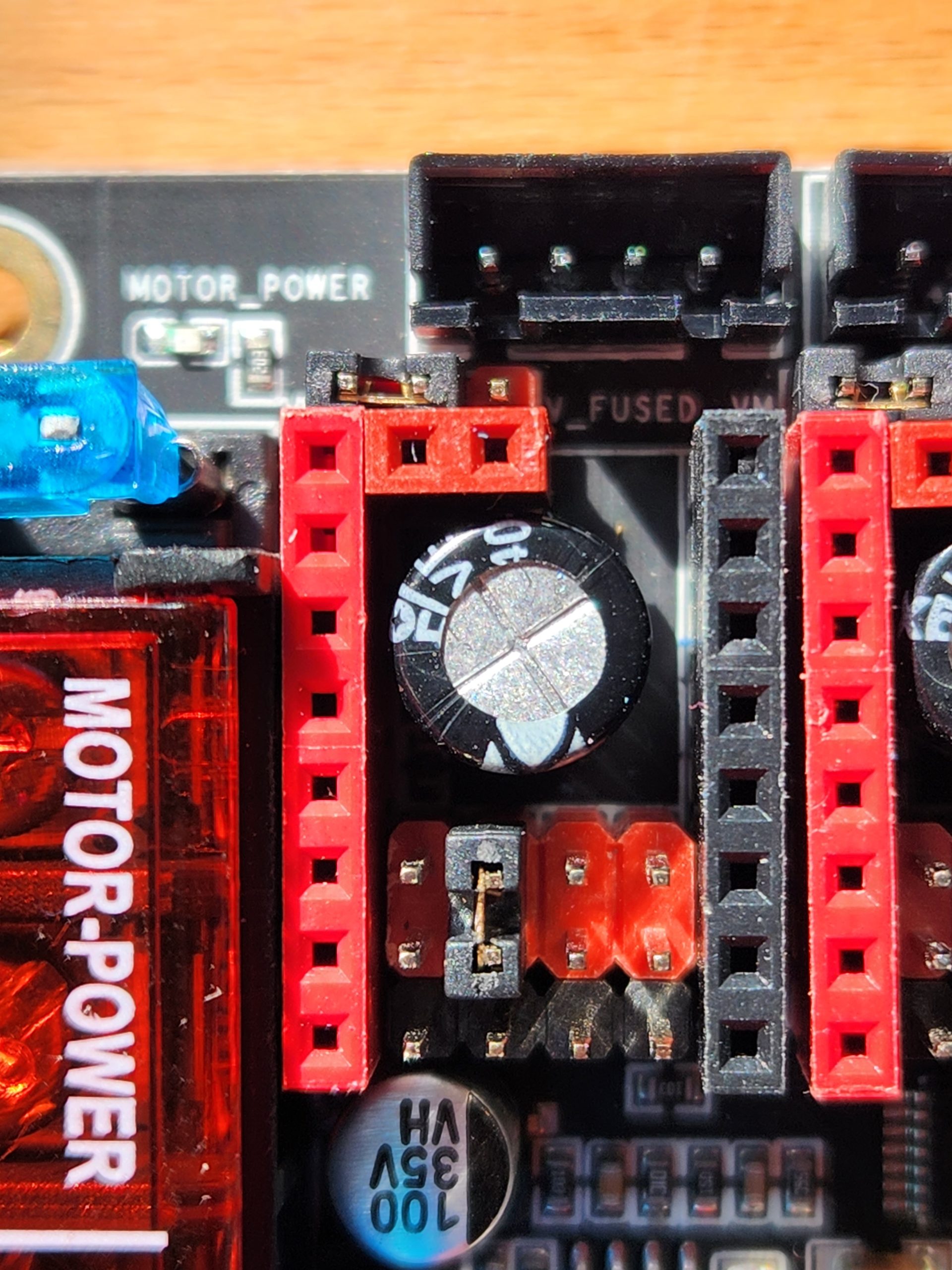
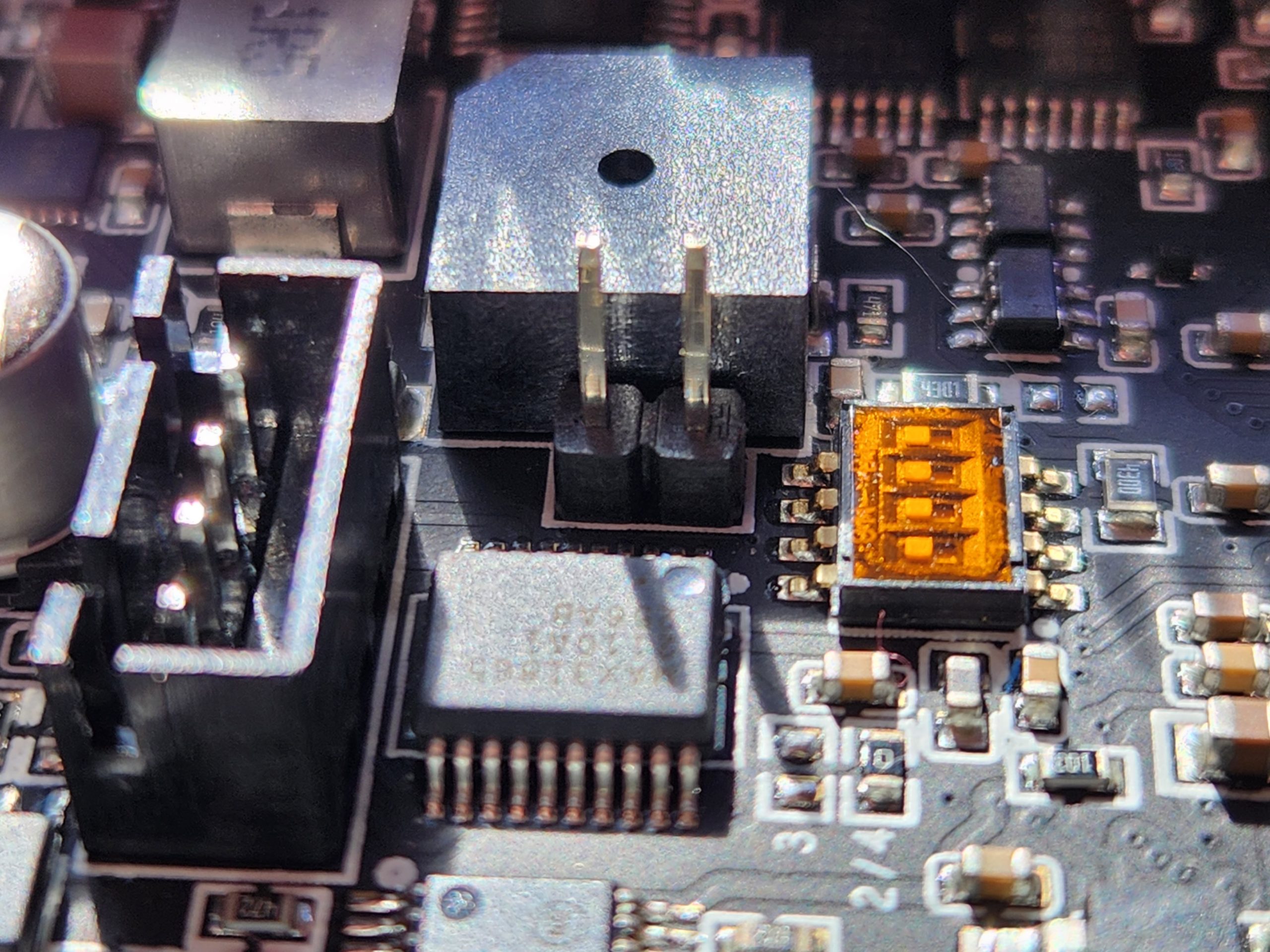
Ich verwende TMC2209-Treiber. Das bedingt den UART-Modus. Dafür ist unter jedem Treiber der zweite Jumper von links zu setzen. Im Auslieferungszustand sind alle vier Jumper gesetzt.

Auch die Stromquelle für die Treiber ist auszuwählen. Man kann entweder die Boardspannung nehmen oder aber über die Terminals eine extra Stromquelle anschließen. Ich werde eine Brücke an den Terminals von der Boardspannung zur Motorspannung legen, weil ich mir einbilde dadurch die Leiterbahnen der Boardlogik etwas zu schonen. Deshalb also Jumper nach links. Im Auslieferungszustand sitzen die Jumper rechts.
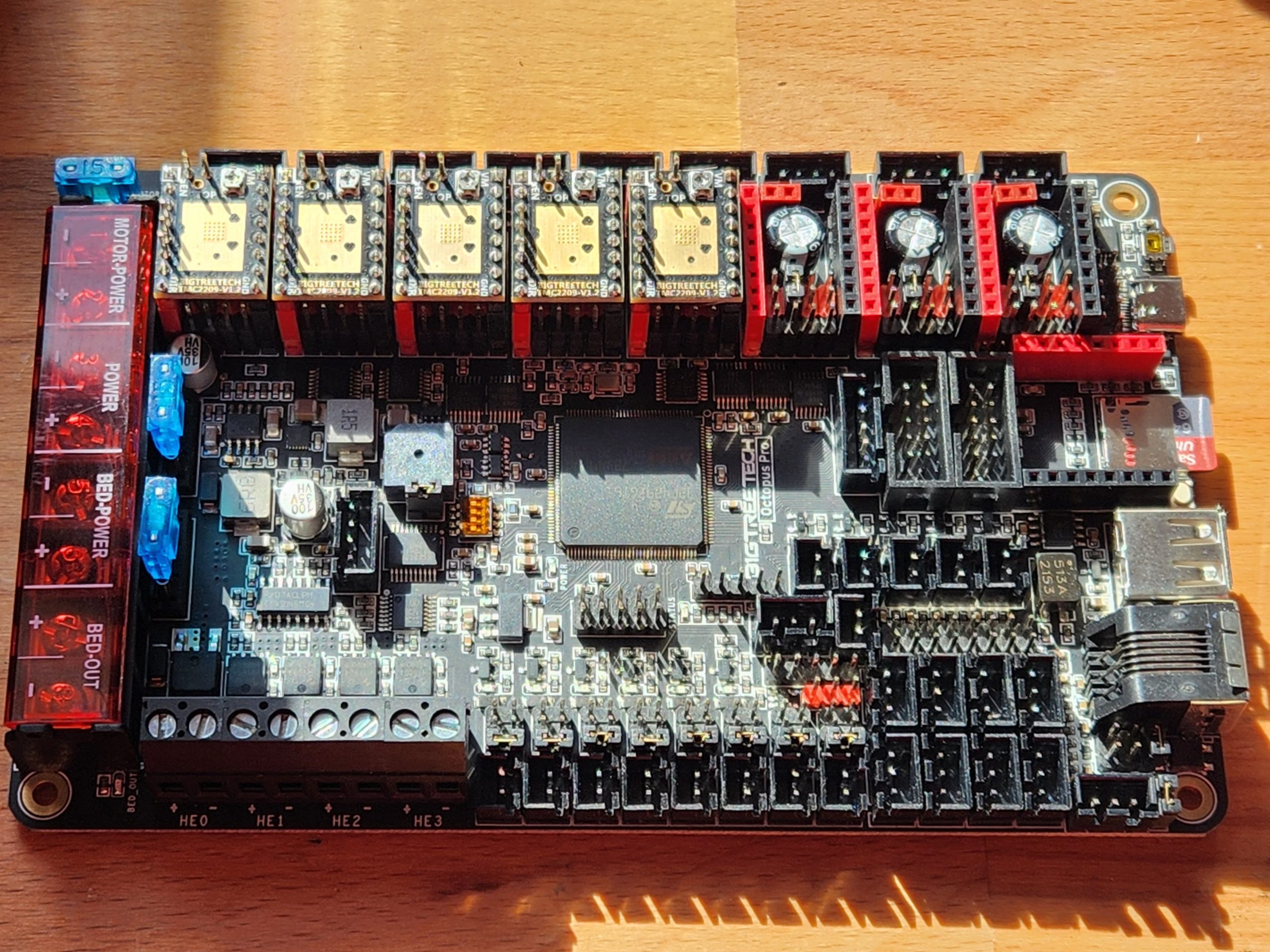
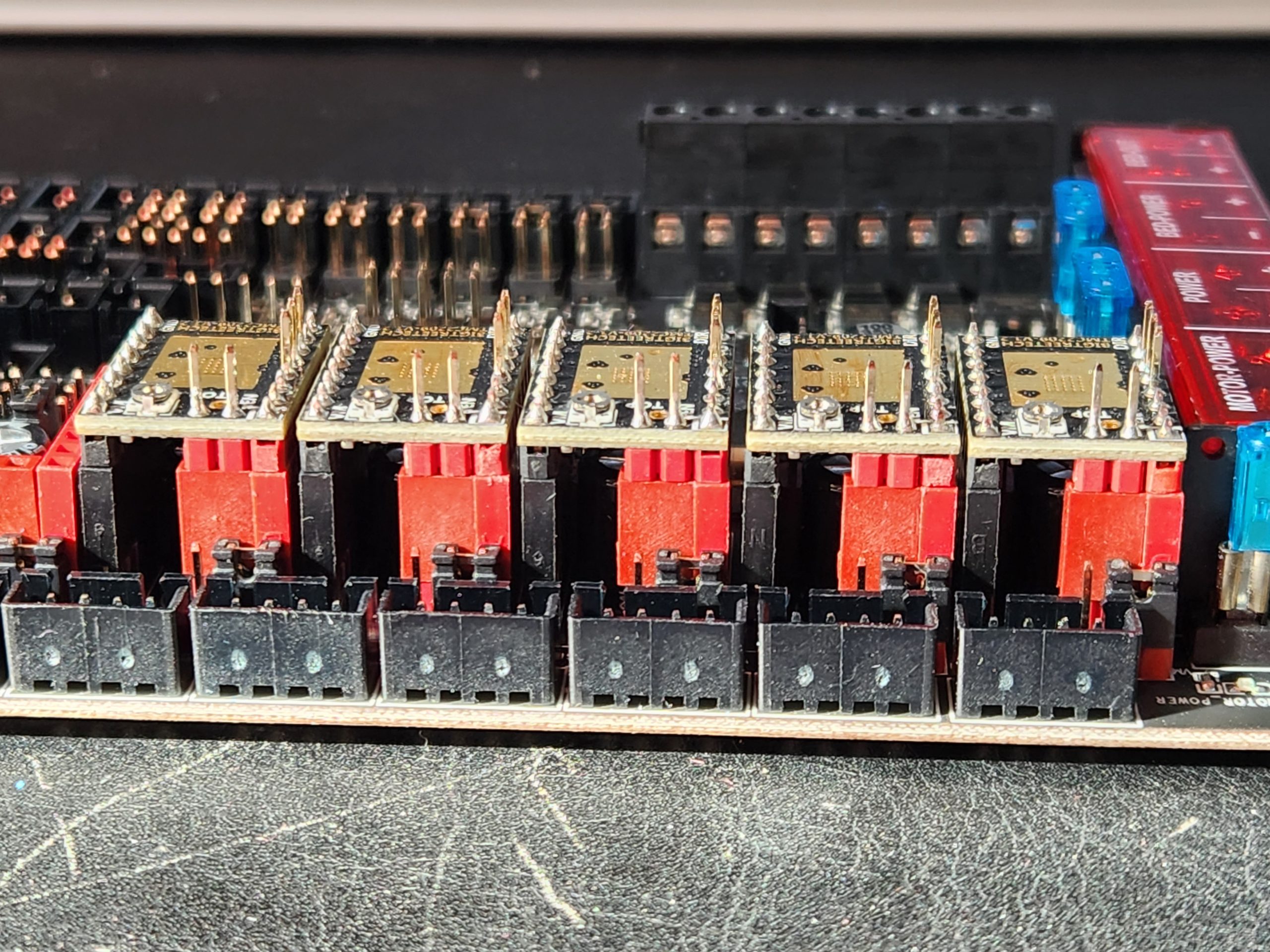
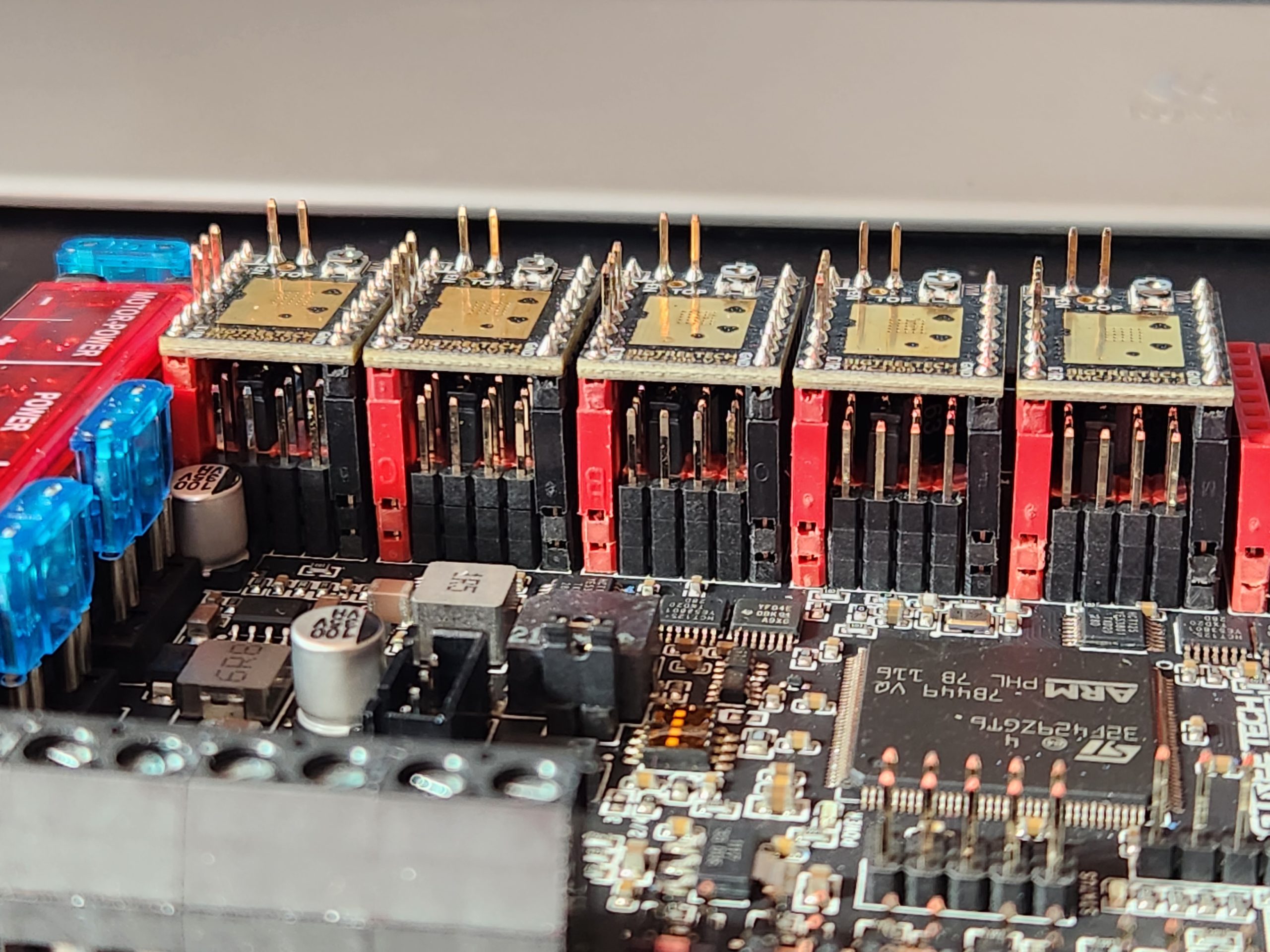
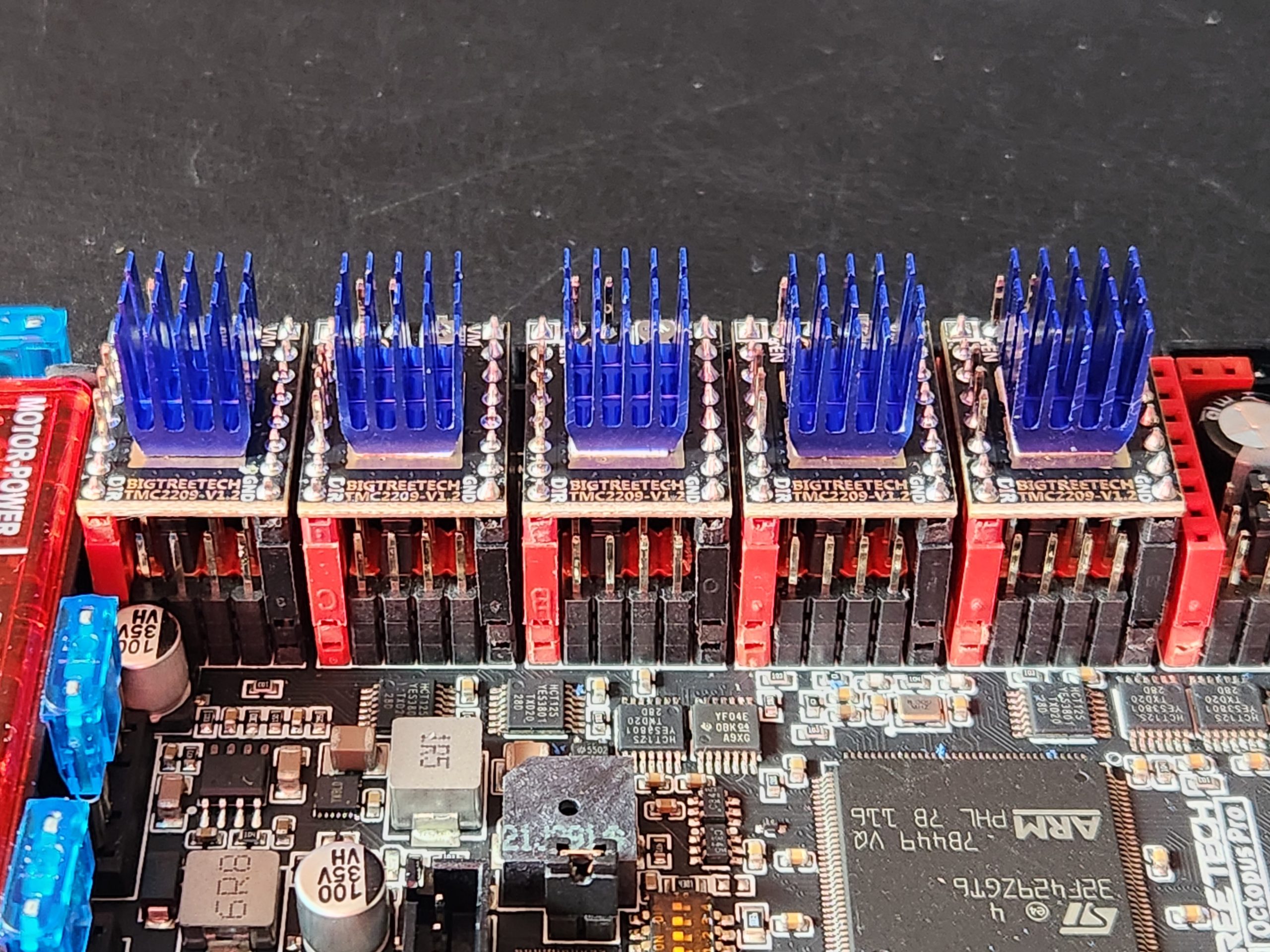
Es sieht also für meine TMC2209 auf meinem Board so aus:
Bei mir sind 5 der insgesamt 8 verfügbaren Treibersteckplätze belegt:
X-Achse
Y-Achse
Z1-Achse
Z2-Achse
Extruder
Nur zur Sicherheit zwei Tipps:
1. Ausrichtung beachten: ENable liegt links oben. Beim TMC2209 kann man eigentlich nicht viel falsch machen, da die zwei zusätzlichen PINs an der Oberkante wirklich nur passen, wenn sie oben richtig eingesetzt sind. Ansonsten würden Sie mit den PINs der Jumper auf der Hauptplatine in Konkurrenz kommen.
2. Achte darauf, dass alle PINs des Treiberchips auch wirklich in den Steckplätzen sitzen. Aufgrund der Verlängerung der Steckplätze liegen diese gern mal etwas krumm. Das führt sehr leicht dazu, dass die PINs neben der Reihe liegen. Gründlich kontrollieren!
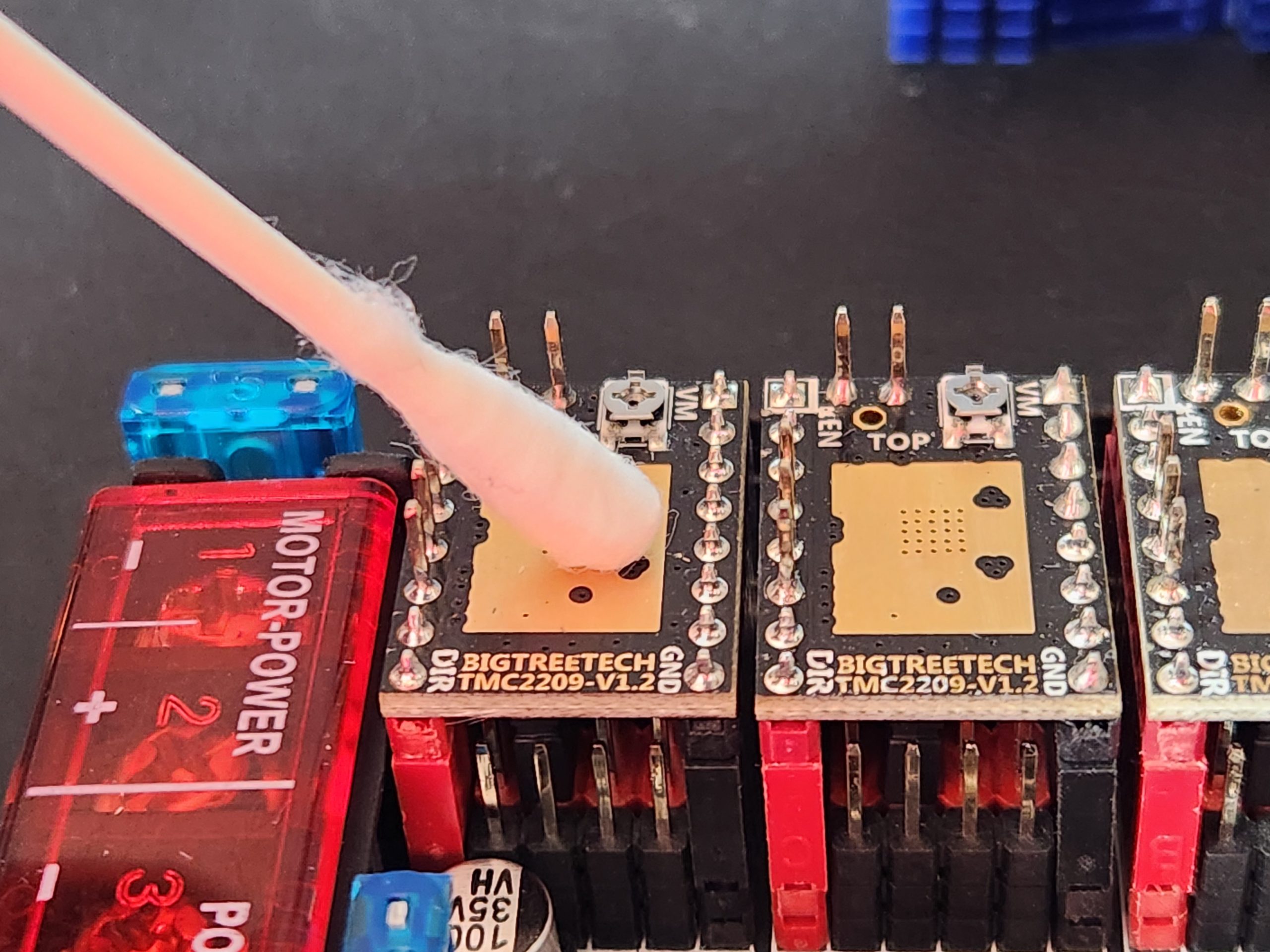
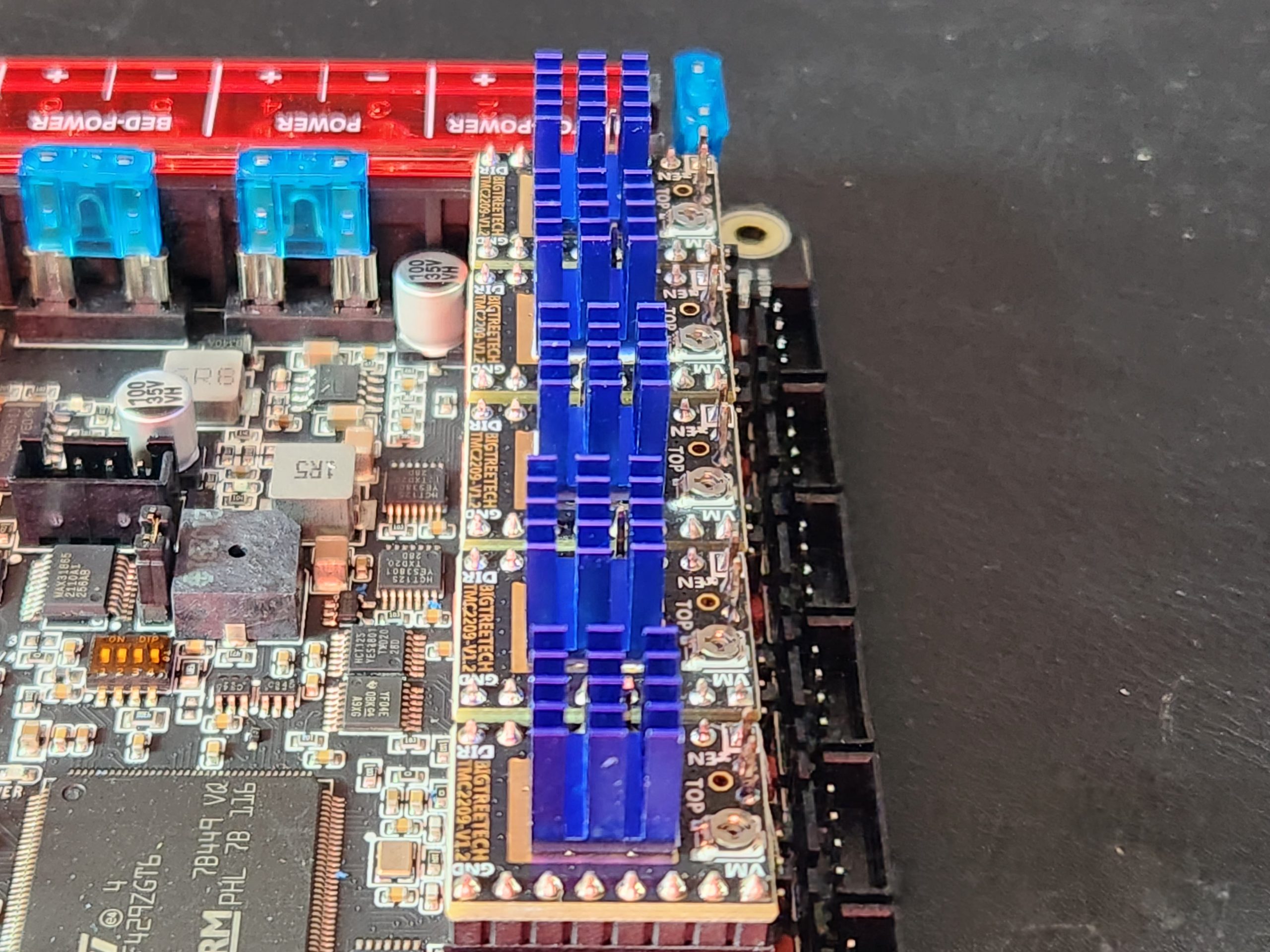
Jetzt fehlen noch die Kühlkörper. Hier ist zu beachten, dass die Kühlkörper genau auf die goldfarbene Oberfläche geklebt werden. Die Kühlkörper dürfen nach Platzierung keinen Kontakt zu irgendwelchen PINs auf dem Chip haben. Es kann nicht schaden, die goldfarbene Kühlfläche einmal mit Alkohol abzuwischen. Fussel dürfen natürlich nicht zurückbleiben.
Das Aufsetzen der Kühlkörper sollte nach Möglichkeit beim ersten Versuch passen. Wenn das kleine Klebepad auf dem Kühlkörper zerrissen ist oder nicht mehr richtig klebt, hilft nur noch ein kompletter Austausch des Klebepads. Man benötigt hier ganz spezielle Pads, die auch die Wärme übertragen können. Ersatz wäre beispielsweise das Akasa Tape, welches ich selbst seit Jahren erfolgreich nutze:
| Als Amazon-Partner verdiene ich an qualifizierten Verkäufen. Für den Käufer ändert sich der Preis dadurch nicht. |
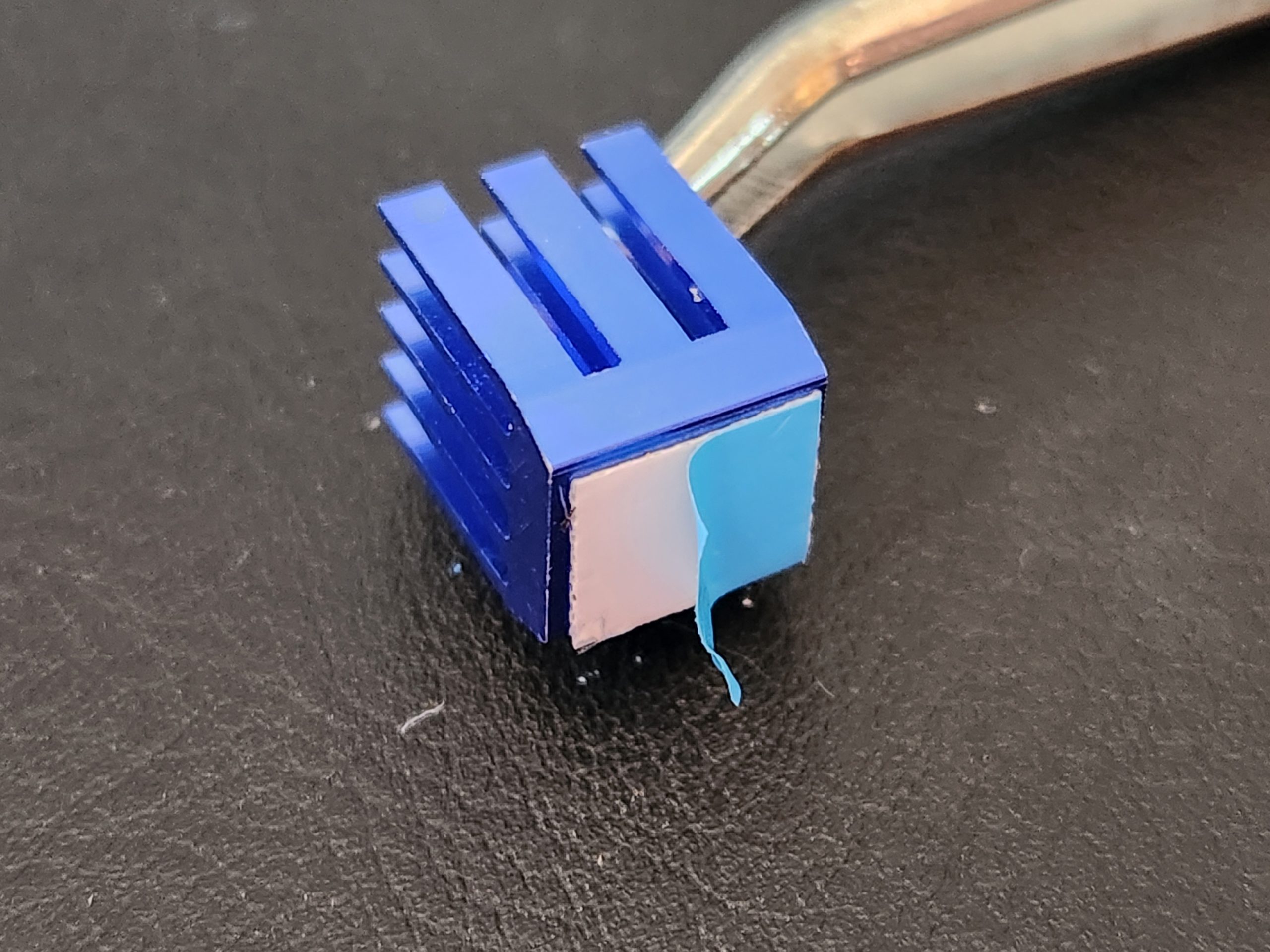
Nur die ganz dünne blaue Folie wird abgezogen. Darunter ist schon das Klebepad. Mit einer Pinzette oder einer geeigneten Spitzzange lässt sich der Kühlkörper auf Anhieb gut positionieren.
Die nach oben stehendn PINs auf dem Treiberchip nehmen Kontaktleisten zum Programmieren auf. Man sollte also hier besonders auf Abstand achten.
Sobald die Treiber eingesetzt sind, lässt sich das Board nicht mehr sinnvoll per USB-Spannung versorgen. Das war eh nur zum programmieren sinnvoll. Der MCU Power Jumper sollte deshalb jetzt entfernt werden. Ab jetzt läuft das Board nur noch mit externer Stromquelle.
Im nächsten Teil geht es weiter mit dem Setzen der notwendigen Jumper. Für diesen Beitrag soll es aber erst mal genug sein.