
Alles dreht sich – alles bewegt sich … (angelehnt an Frida Kahlo)
Dieses Ziel verfolge ich natürlich auch mit dem Umbau meiner China-Kleinfräse. Nach dem Zerlegen der Altelektronik und dem Aufbau der neuen Elektronikbox bin ich auf dem besten Weg, dass sich auch an meiner Fräse wieder etwas bewegt.
Der erste Schritt zu diesem Ziel liegt in der Einststellung der Pololus, der DRV8825 Schrittmotortreiber. Wie schon an anderer Stelle in meinem Blog beschrieben, müssen die Treiberbausteine auf ihre jeweilige Aufgabe eingestellt werden. An meiner Fräse wurden NEMA23-Stepper folgenden Typs verbaut: 23HD56005Y-21B. Die Suche nach dem Datenblatt bringt dann auch die technischen Daten hervor, von denen ich nur den maximalen Strom pro Coil (rated current per phase) und die Schritte (steps oder step angle) pro voller Umdrehung benötige. 2,5 Ampere sind es und 200 Steps bzw. 1,8° pro Step. Die Schrittmotoren werden auf 70% des Maximalstroms eingestellt, – eine Vorgabe, die auch auf der Pololuseite nachzulesen ist. Neben der Erklärung auf der bereits genannten Seite in meinem Blog kann auch einfach folgende Formel (nur für den DRV8825) verwendet werden:
V(ref) = 0,7 * I(max) * 0,5 Ohm
Die Referenzspannung ergibt sich dann in meinem Fall zu 0,875 Volt, die am Schleifkontakt des Poti gegen Minus (24V-Anschluss Minus) gemessen werden.
Wichtige Voraussetzung: Ab jetzt wird der 12-polige Stecker der Maschine aufgesteckt und gesichert. Er darf nach Anlegen der Stromversorgung nicht mehr gezogen werden. Das ist der sichere Tod der Treiberbausteine, – wenn nicht sogar mehr!
Ich habe also den 12-poligen Stecker eingesteckt und gesichert, 230 Volt eingesteckt und den Hauptschalter betätigt. Der PWM-Regler ist im ausgeschalteten Zustand. Das Gehäuse der Elektronikbox ist offen. Vorsicht Hochspannung! Überlasse solche Arbeiten Leuten, die etwas davon verstehen!
Nichts passiert! Sehr gut! Alles andere wäre schlecht. Einzig die rote LED auf der Frontblende sollte leuchten.
Ich messe zunächst, ob die Versorgungsspannung von 24 Volt an der PWM-Platine und am CNC-Shield anliegt. Wenn das bestätigt ist, geht es an die Treiber. Gegen Minus gemessen soll am Schleifkontakt des winzigen Potis auf jedem Treiber etwa 0,875 Volt anliegen. Bei mir war es 0 Volt, und zwar an jedem. Da ist was faul!
Ganz einfach: Die Treiber werden erst aktiv, nachdem ein Rechner mit USB angeschlossen wird. Damit wird dann der Arduino UNO mit Strom versorgt und der schaltet dann auch sofort die Treiber ein. Dass der Rechner eventuell meckert, weil er die Hardware nicht kennt ist momentan völlig egal. Hauptsache er liefert Strom über USB.
Die Messung wird wiederholt. Diesmal liegen jeweils weit über 1 Volt an. Hauptschalter aus. USB abziehen. Stromlos machen !!
Dreht man das Poti auf dem Treiber im Uhrzeigersinn wird die Referenzspannung kleiner. Poti nur stromlos bedienen. Das mag Paranoia sein. Ich bin vorsichtig.
Alles wieder unter Strom setzen, auch USB nicht vergessen. Neu messen.
Man tastet sich jetzt also langsam an den Wert so nah wie möglich heran. Wenn es irgendetwas zwischen 0,84 und 0,9 ist, reicht das vollkommen. Von der Fräse und ihren Steppern wird man keinerlei Reaktion wahrnehmen, denn der Strom wird gar nicht durchgeschaltet.
Wenn das erledigt ist, dann kann auch die Spindelversorgung geprüft werden. Sofern stromlos der 25-polige Sub-D-Stecker verbunden wurde und dann unter Strom das Einstellpoti auf der Frontplatte aufgedreht wird, sollte sich der Spindelmotor bewegen. Ein Blick auf die Drehrichtung sollte nicht fehlen. Von oben auf den Motor muss sich die Spindel im Uhrzeigersinn drehen. Ansonsten muss an geeigneter Stelle umgepolt werden.
Sollte der Rechner vorher die Hardware des Arduino Uno nicht erkannt haben, so muss jetzt der Treiber installiert werden. Entweder man installiert dazu einfach die komplette Arduino IDE, was zwei Beiträge vorher beschrieben wurde, oder man extrahiert aus dem Installationspaket der IDE den Driver-Ordner und installiert darüber. Die IDE benötigen wir zum Betrieb nicht.
Zuletzt kann jetzt noch GRBL-Controller installiert werden, was ich auch schon gezeigt hatte. Passenden Port suchen, Geschwindigkeit der Schnittstelle hoch einstellen und verbinden.
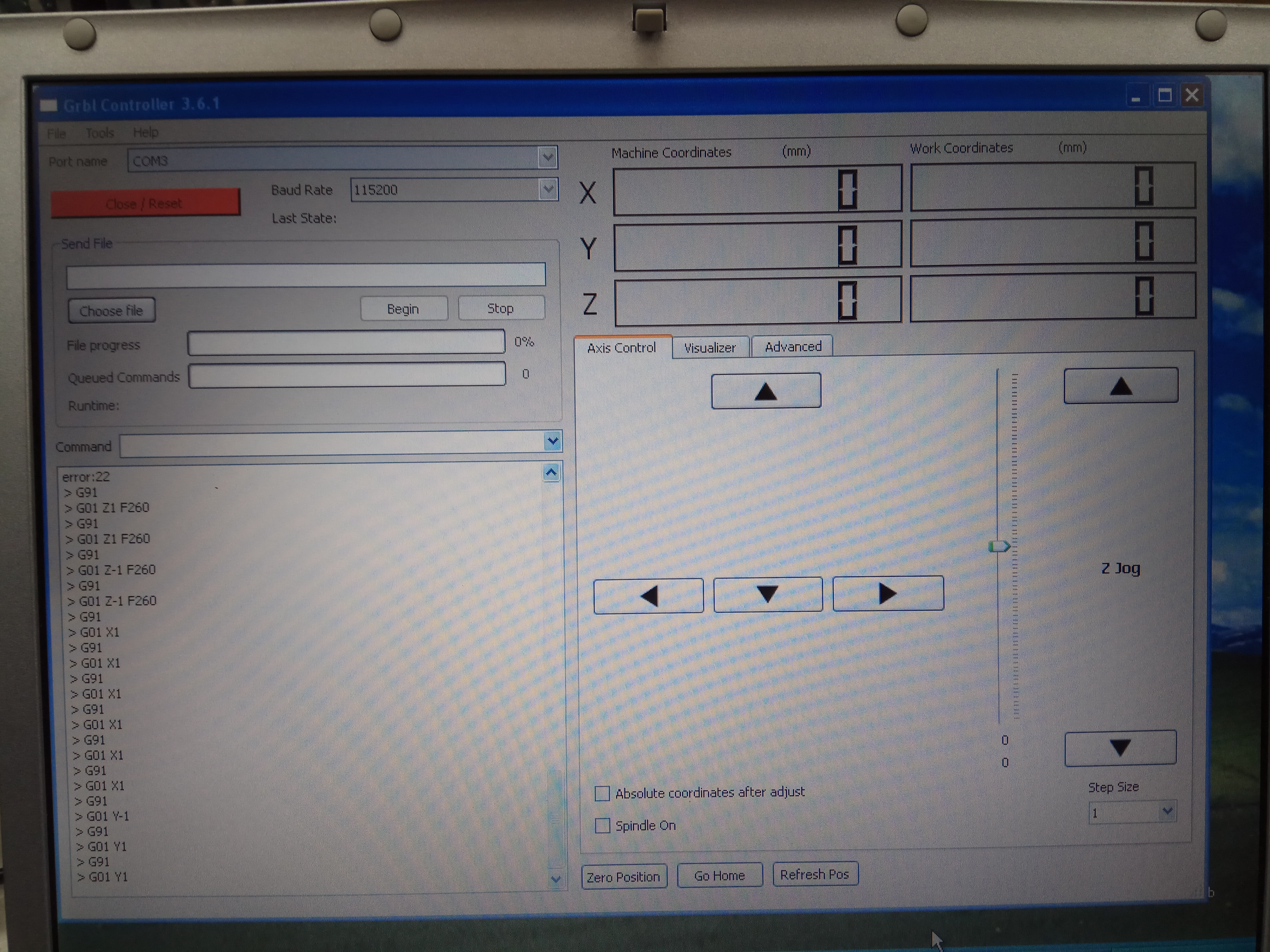
total retro hier: Abfotografierter Bildschirm 🙂
Die Startsequenz abwarten und danach unten rechts auf Go Home klicken. Danach lassen sich über die Pfeiltasten die Achsen bewegen. Na ? Zuordnung richtig?
Nach dieser sehr textlastigen Erstinbetriebnahme geht es beim nächsten Mal in die genaue Einstellung.
Ein Schlusswort zu Frida Kahlo: Ich wusste das natürlich auch nicht, dass das Zitat an einen Ausspruch von einer Frida Kahlo erinnert. Ich wüsste nicht, dass ich von Ihr schon mal gehört hätte. Ich habe es beim Schreiben gegoogelt. Die verlinkte Seite ist aber interessant. Erstens war der zitierte Spruch etwas anders und ist aus dem Zusammenhang gerissen und zweitens gibt’s noch einige Zitate mehr. Es ist aber durchaus ein Steckenpferd von mir, solchen Sprüchen und auch Begriffen mal auf den Grund zu gehen. … oder weiß jemand beispielsweise wo der Begriff „Nagelprobe“ herkommt?