
Das RAMPS-Shield ist jetzt soweit fertiggestellt. Jetzt wird es mit dem arduino-Board verbunden. Bei diesem Schritt ist es sehr wichtig, dass alle Stifte des RAMPS-Shields möglichst gleichzeitig in das arduino-Board eingesteckt werden. Also zunächst kontrollieren ob alle Stifte gerade ausgerichtet sind. Dann Teile aufeinanderlegen und durch Druck auf die Stiftleisten (nicht auf die Platinen drücken !!) langsam und gleichmäßig zusammenfügen. Es ist völlig richtig, dass in der vorderen und hinteren Buchsenleiste jeweils links 2 Stifte unbelegt sind.
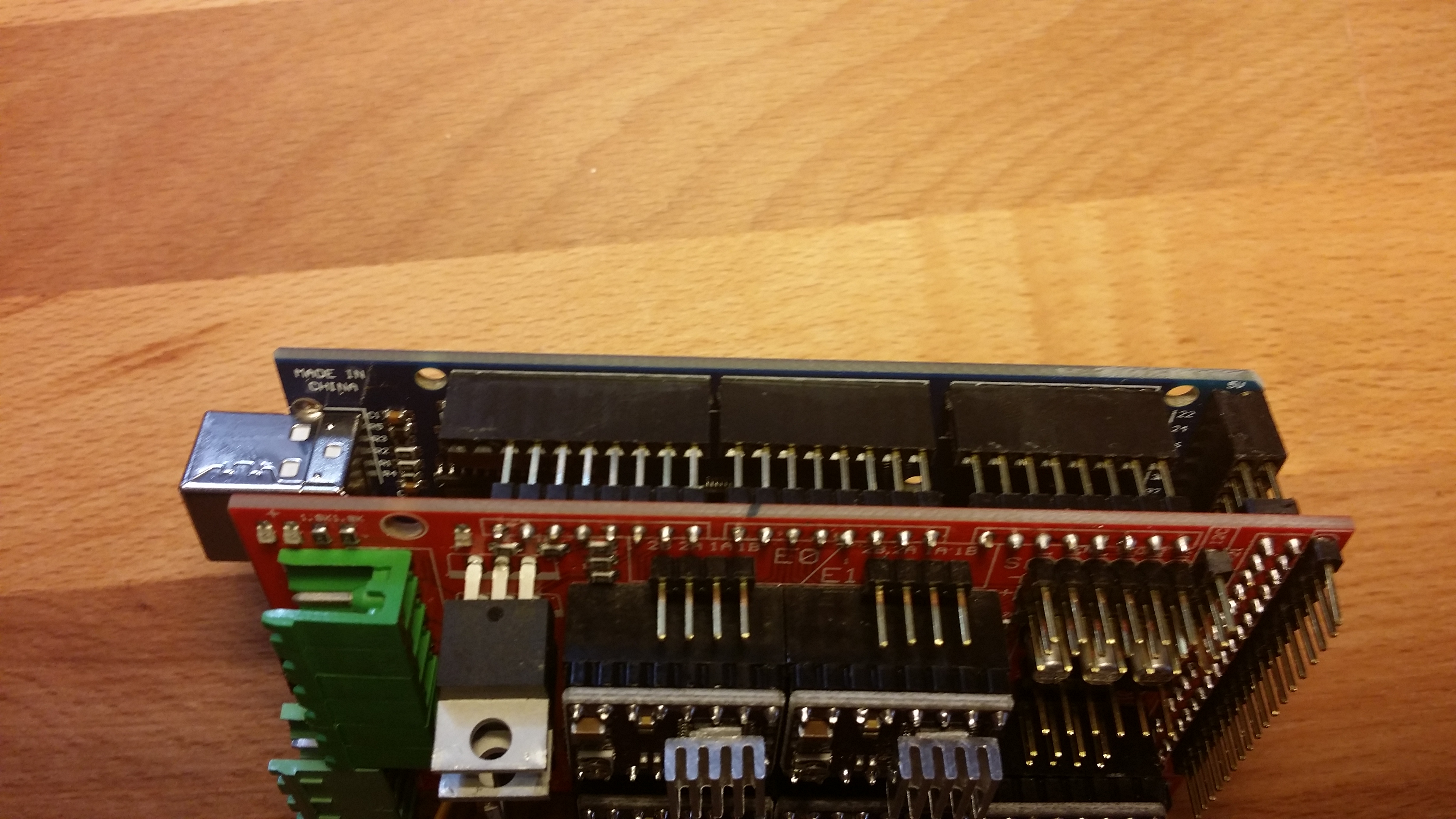
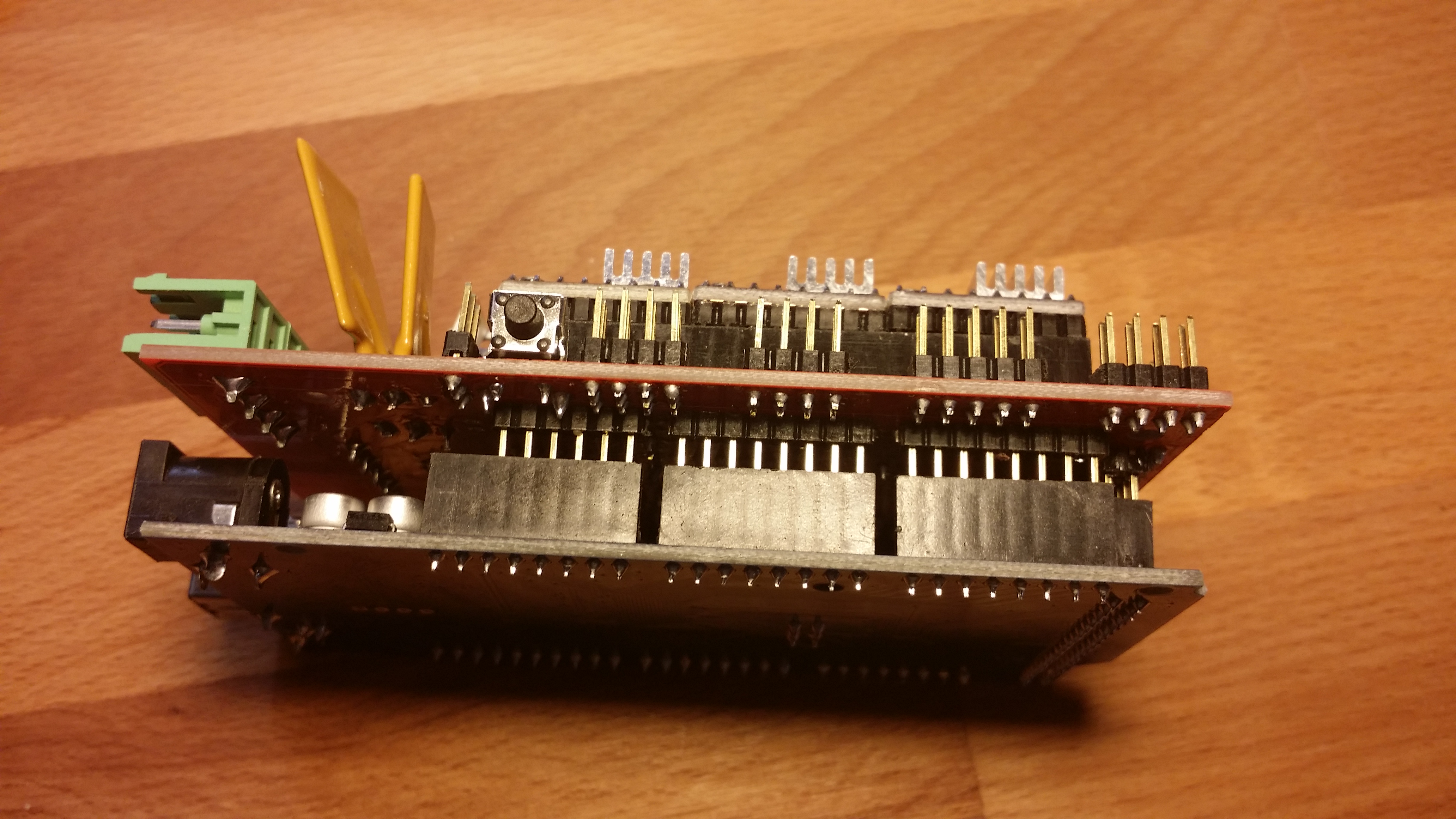
Das sollte dann zum Schluss so aussehen.
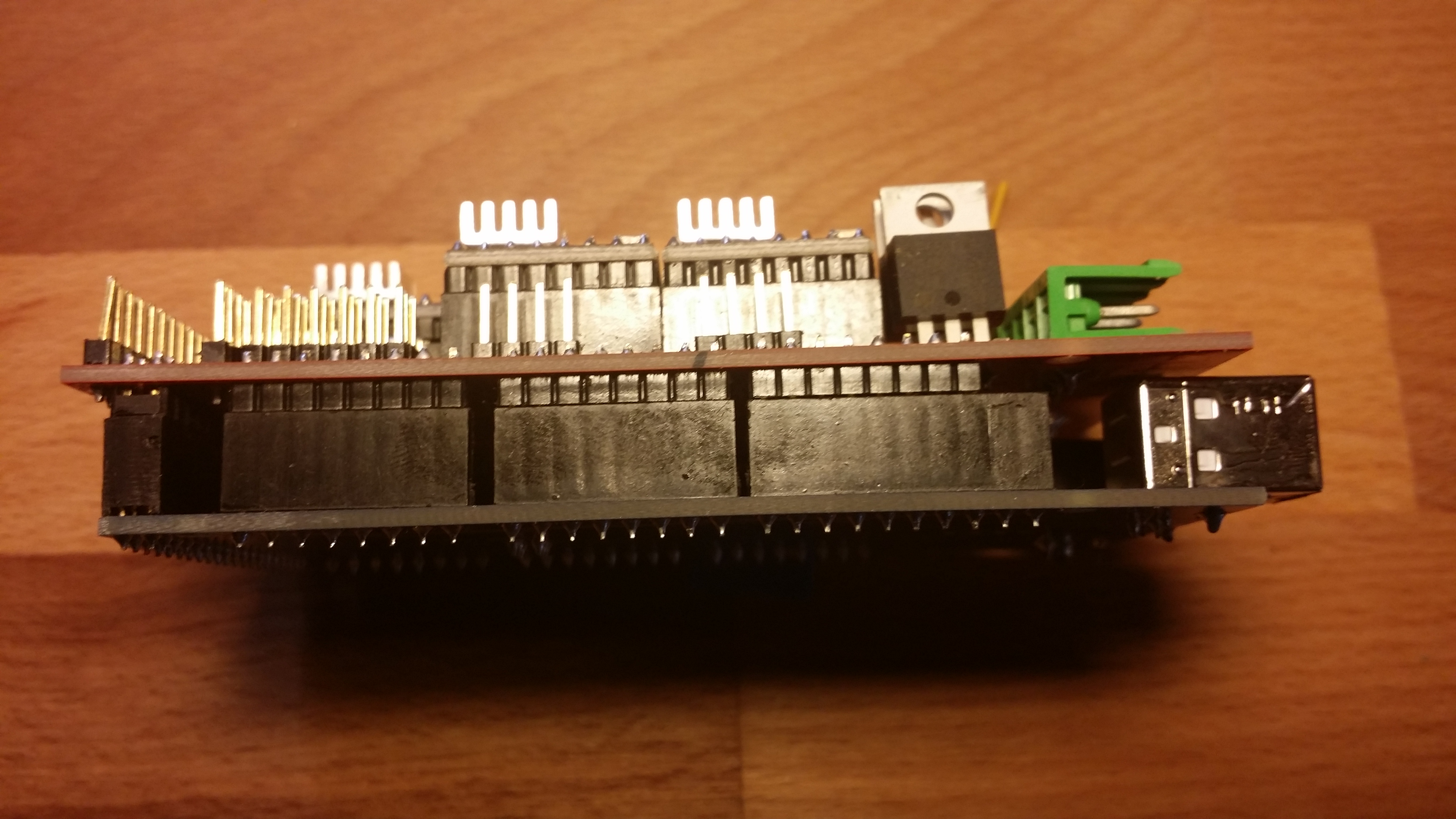
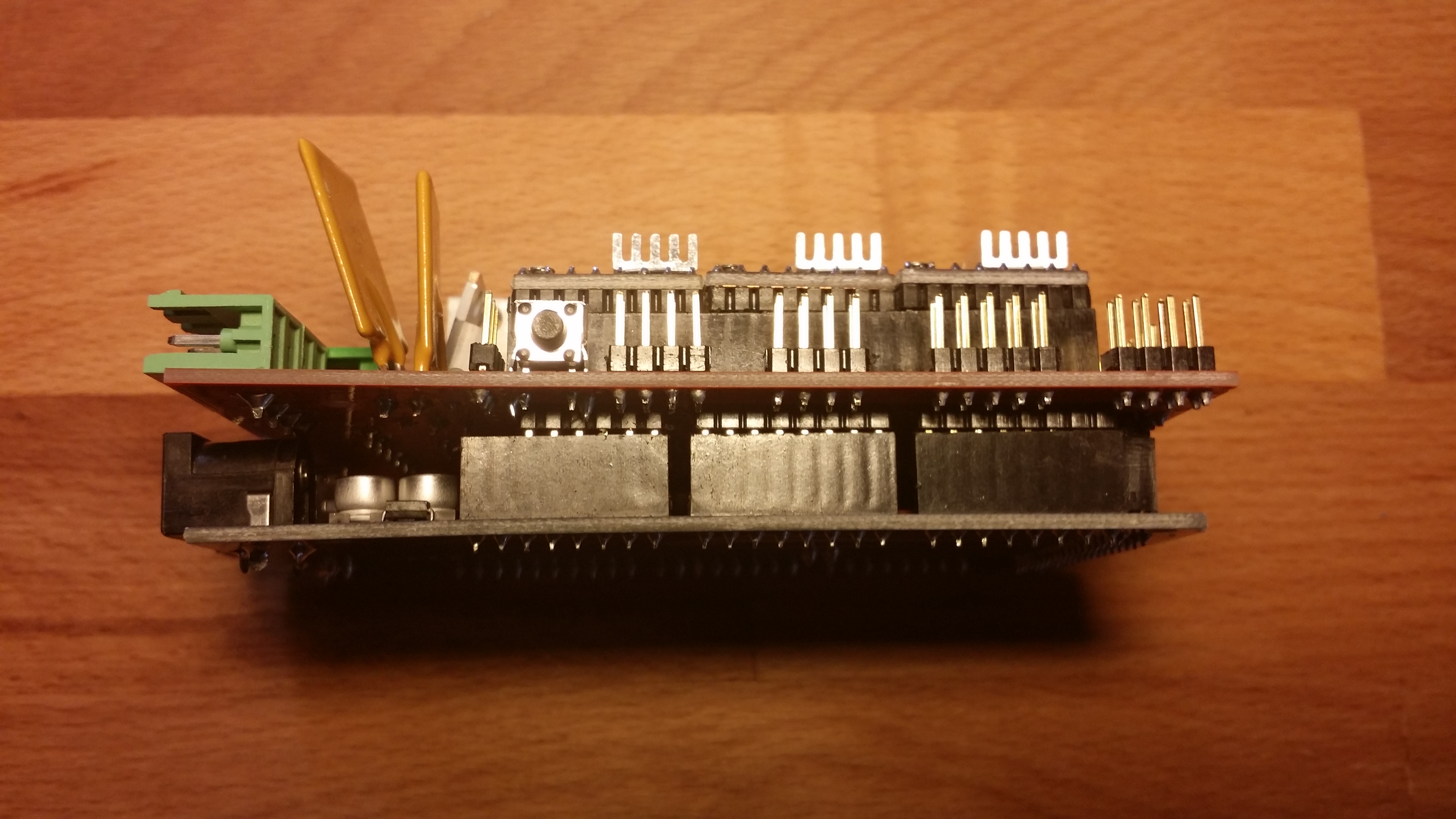
Man sieht hier schon ein kleines Problem. Da die Stifte von den Versorgungsspannungsbuchsen etwas zu lang sind, liegen sie auf den Hohlsteckeranschluss des Arduino auf und das Ganze lässt sich nicht ganz optimal zusammenstecken. Da hilft nur Eines: Kürzen der genannten Stifte.
Zu guter letzt noch ein Hinweis auf den Anschluss der Motoren. Ich hatte ja schon auf das Wiki verwiesen. Dort ist der Anschluss sämtlicher Komponenten in einem Prinzipschaubild hervorragend erklärt. Was nicht so gut zu sehen ist, ist der Anschluss von optischen Endstopps. Leider wird im Wiki nur der mechanische Endstop gezeigt. Kein Problem …
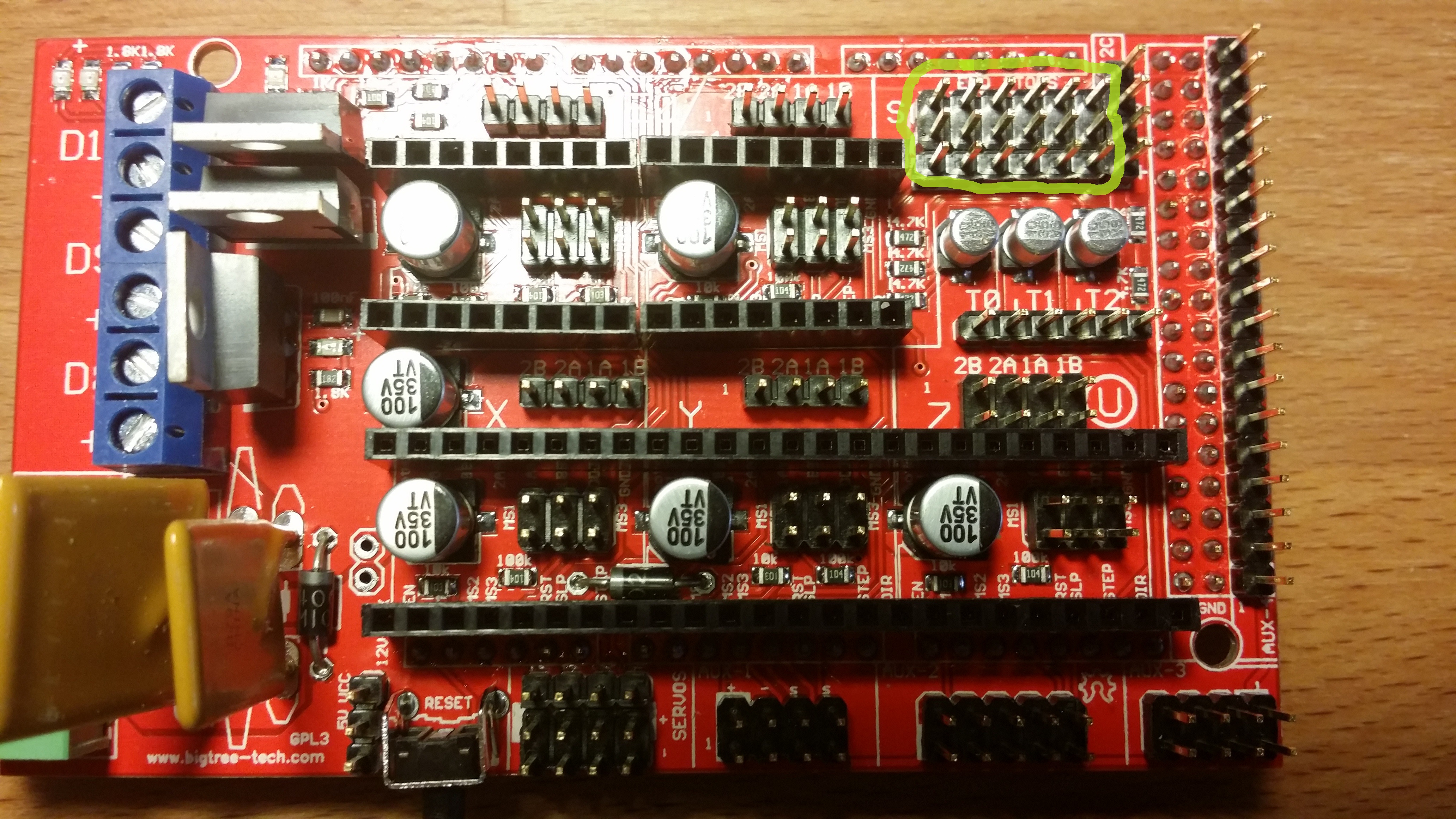
Wie üblich grün umrandet ist auf dem Bild der Bereich der Endstop-Anschlüsse zu sehen. Es gibt für jede Achse einen Anschluss für Minimum und Maximum. Benutzt werden immer nur die Anschlüsse für Minimum, – also Nullpunkt der jeweiligen Achse. Minimumanschlüsse sind von links der Erste, der Dritte und der Fünfte und zwar in dieser Reihenfolge für x, y, z.
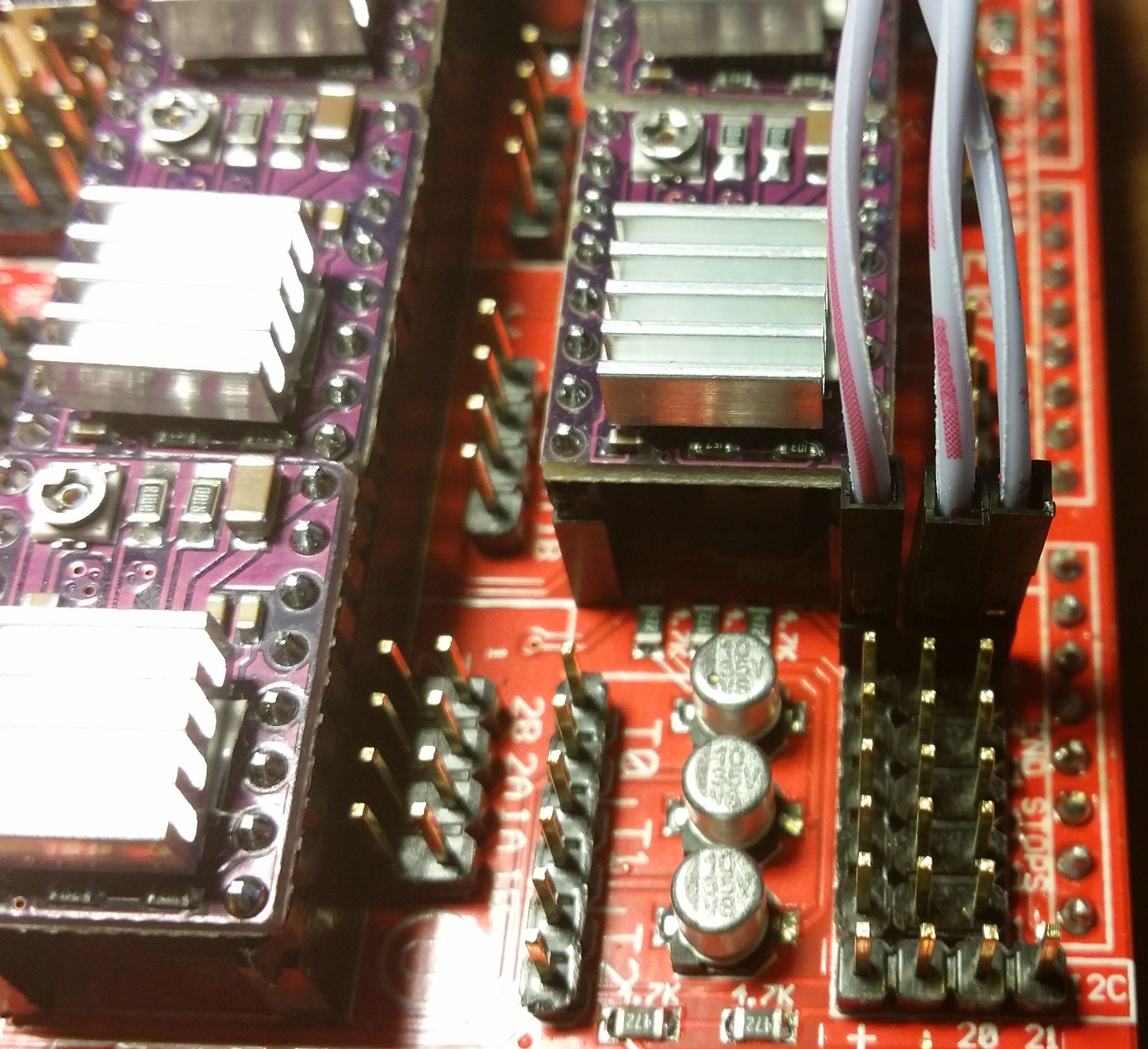
Auf der Platine eines Endstops kann man immer die Signalanschlüsse ablesen. Auf dem RAMPS sind sie ebenfalls zu sehen. Leider ist die Reihenfolge der Anschlüsse auf Endstop und RAMPS nicht gleich Das sieht man auf den folgenden Bildern.
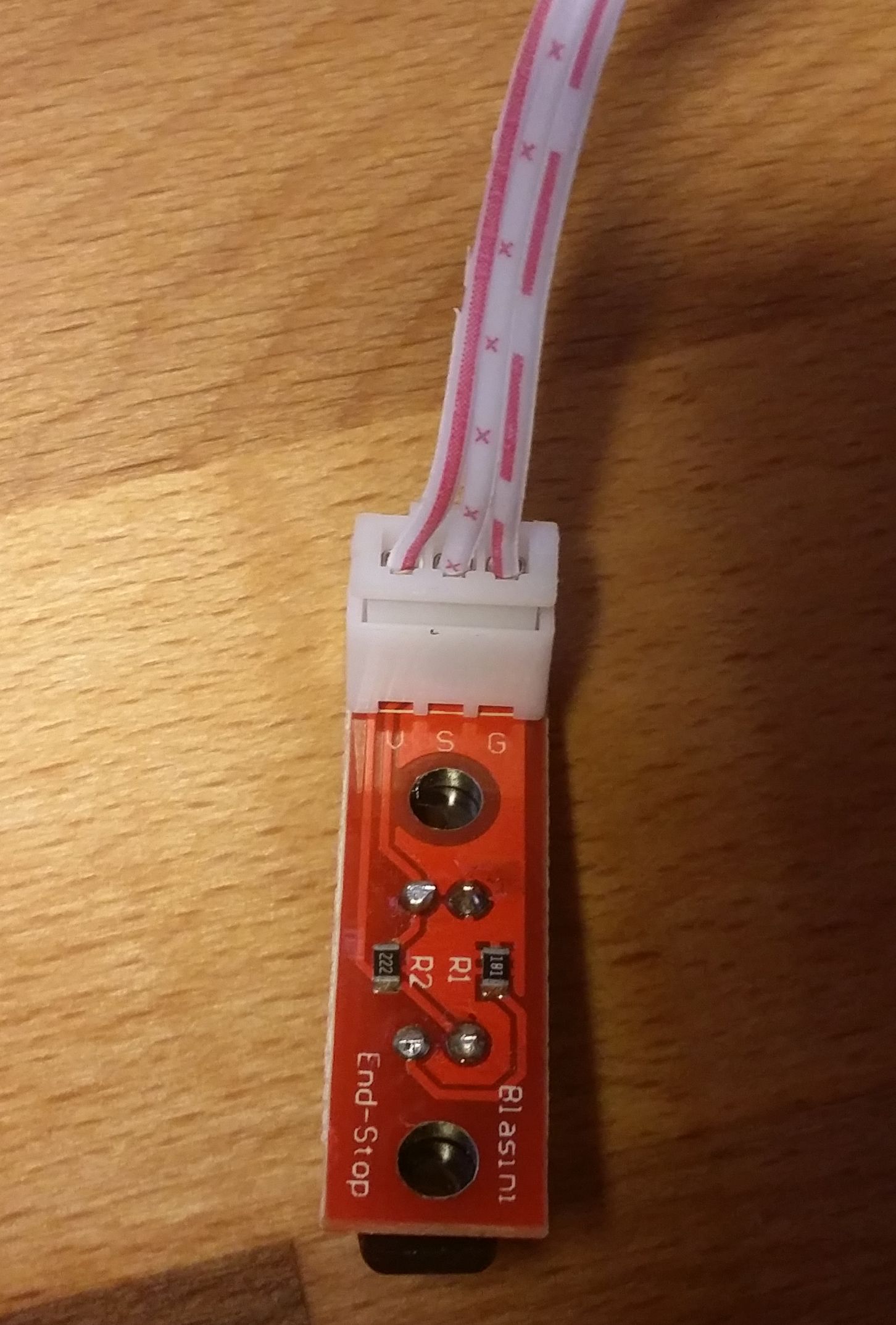
| postitive Spannung 5V | Ground | Signal | |
| Endstop | V (links) | G (rechts) | S (Mitte) |
| RAMPS | + (links) | (Mitte) | S (rechts) |
| Leitung | durchgehender Strich | unterbrochener Strich | gepunktet |
Gemäss der Tabelle können dann die drei Endstops angeschlossen werden.
Guten Abend! Erstmal Bravo! Super erklärt… Nun zu meiner Frage. Auf dem Arduino Mega2560 sind ja links oben beim USB und neben dem Reset Knopf jeweils 6 male Pins für Jumper. Wofür sind die, bzw. kann ich die einfach freilassen?
Danke und Gruß Martin
Hallo Martin,
zunächst mal vielen Dank für das Lob.
Diese Pins sind keine Steckplätze für Jumper !!!
Bitte keine Jumper aufstecken. Hier wird im Bedarfsfall ein spezielles Programmiergerät angeschlossen oder eine Referenzspannung angelegt. Auf arduino.cc kann man das genauer nachlesen. Die Erklärungen für diese beiden Steckplätze habe ich hier mal rauskopiert:
Für die Pins links neben dem RESET:
SPI: 50 (MISO), 51 (MOSI), 52 (SCK), 53 (SS). These pins support SPI communication using the SPI library. The SPI pins are also broken out on the ICSP header, which is physically compatible with the Uno, Duemilanove and Diecimila.
Für die Pins neben USB:
AREF. Reference voltage for the analog inputs.
Solange wir uns hier im 3D-Druckerbereich mit fertiger Firmware und Bootloader bewegen, benötigen wir beide Anschlüsse nicht.
Hallo,
ich habe heute deinen Blog entdeckt, und bin ja schwer beeindruckt, von deinem Projekt „3D-Drucker selbstgebaut“ 🙂
Ich sitze gerade an einem ähnlichen Projekt, allerdings ist meins wesentlich primitiver…
Bin auch gerade dabei, die Elektronik dazu anzuschließen. Ich benutze ebenfalls ein Mega2650+Ramps 1.4+ A4988 Treiber + Firmware Marlin.
Mich würde jetzt interessieren, wie ich am A4988 an dem kleinen Poti den richtigen Strom einstellen kann, bei 1/16 microstepping.
Ich benutze Wantai Schrittmotore mit 1,8 Grad/step und 1,7A pro Coil.
Ich habe da diese „Faustformel“ für Vref entdeckt: (1,7A x 0,7) x (8 x 0,05 Ohm)
WIE kann ich überprüfen, ob bei dieser „Grundeinstellung“ die 1/16 microsteps auch richtig funktionieren ?
Wäre dankbar, wenn du in deinem nächsten Blog („Aufbau der Steuerelektronik – Teil 4“)
darauf eingehen könntest.
Grüße,
Ivo
Hallo Ivo,
schön, dass Du in meinem Blog ein paar Anregungen finden konntest, – dafür ist er gemacht.
Der große Drucker ließ sich leider in dieser Art nicht fertig aufbauen. Ein paar Designfehler führten letztendlich dazu, dass ich das Projekt aufgegeben habe und alles zerlegt habe. Ich spiele allerdings weiterhin mit dem Gedanken etwas Größeres zu bauen. Vielleicht in die Richtung „Ender“.
Die Informationen zum Einstellen der kleinen Potis findest Du unter http://sturm.selfhost.eu/wordpress/pololu-schrittmotortreiber-einstellen/ . Falls Du noch Fragen hast, lass es mich wissen.
Hallo Thomas,
Danke, für die schnelle Antwort !
Ich hätte wohl etwas länger suchen sollen, aber wie gesagt, ich habe deinen Blog erst gestern entdeckt.
Hallo Thomas,
hast du mal dran gedacht, statt etwas „Größerem“ etwas „Kleineres“ zu bauen ?
Soll heißen, einen BauRaum von z.B. 50x50x50mm, den aber den SEHR GENAU…
Meines Wissens hat sowas bisher noch keiner gebaut 🙂
Nur mal so theoretisch, in die Wüste geschmissen :
Gibt ja Schrittmotore mit 0,9 Grad/Step, also schonmal 400 Steps/Umdrehung.
Dann einen Motortreiber mit 1/32, sind 12800 Steps/Umdrehung.
Ein Zahnrad mit 20 Zähnen, D=12mm, x Pi, = 37,699 mm
37,699mm / 12800 = 0,00294mm / Step, also etwa 3/1000stel mm/Step 🙂
Es gibt auch Zahnräder mit 16 Zähnen, dann liegen wir noch etwas besser 🙂
Beim „HotEnd“ müsste da natürlich auch noch was passieren…
Gibt wohl Edelstahldüsen mit 0,2 mm…
Mir ist natürlich klar, daß das erstmal rein theoretische Werte sind, und im Bereich
von Tausendstel Millimeter spielen natürlich auch Toleranzen in den Lagern, etc, eine große Rolle…
Aber stell dir mal vor:
Ein kleiner Drucker, der im Bereich 1/1000mm drucken kann…..;-)
lg
Ivo
Hallo Ivo,
die Idee ist sicherlich nicht schlecht. Ob das dann aber bei der gewünschten Genauigkeit noch mit Kunststoffelementen aus dem 3D-Druck funktioniert ist fraglich. Ich habe leider aufgrund eigener Projekte keine Zeit Deinen Vorschlag auszuprobieren. Mag jemand anderes dazu Stellung nehmen oder hat jemand eventuell schon Erfahrungen in dieser Richtung?
Gruß an alle
Thomas
P.S.: Es geht leider manchmal einige Zeit ins Land, bevor ich mich wieder um den Blog kümmern kann. Leider bleibt dann auch der eine oder andere Kommentar etwas länger liegen. Das ist in keinster Weise als Wertung zu sehen. Ich bitte um Verständnis.