
Der Titel des heutigen Blogeintrags ist eine kleine doppeldeutige Anspielung:
Bewegung
Zum einen tut sich endlich mal wieder was bei diesem Projekt. Ich möchte ja gerne schneller vorwärtskommen, aber leider reicht die Zeit nicht mal ansatzweise für alle meine Interessen und Verpflichtungen. Das Thema 3D-Druck ist nunmal nicht gerade überlebenswichtig und fällt daher so ziemlich als Erstes hinten runter. Das geht wohl nicht nur mir so, deshalb gehe ich mal vom Verständnis meiner Leserschaft aus. Apropos Leserschaft: Ich sehe ja, dass mein Blog recht gut angenommen wird. gute 1000 Besucher pro Monat freuen mich wirklich sehr. Ich würde mich über mehr Kommentare freuen. Ehrlich gesagt kommt da nahezu nichts. Selbst zu meinem Angebot ein Forum zu öffnen führte zu keinerlei Reaktion. Das es grundsätzlich technisch funktioniert, beweisen die wenigen angekommenen Kommentare (… und natürlich die Spameinträge). Ich glaube auch nicht, dass die Hemmschwelle zu hoch ist. Woran liegt es? B-I-T-T-E gebt mir eine Rückmeldung.
Wesentlich wichtiger ist aber der Ausdruck „Bewegung“ in Bezug auf dieses Projekt. Außer ein paar Aluprofilen ist ja noch nicht viel zusammengekommen. Damit kann man wohl kaum drucken. Jetzt kommt die Montage des ersten Schrittmotors für die x-Achse.
Sowohl für die Bewegung in X- als auch in Y-Richtung halte ich den Riemenantrieb für die geeignetste Methode des Antriebs. Das zeigen auch alle kommerziellen Drucker. Sämtliche Ansätze mit einem Riemen für beide Achsen und kompliezierter Ansteuerung für die Differenzierung der Achse halte ich ebenfalls für zwar interessant und technisch ambitioniert, – aber eben nicht betriebssicher und wartungsfreundlich. Schnecken und Gewindeantriebe scheiden aus diversen Gründen wie Geschwindigkeit, Wartungsintensität etc. auch aus. Also -> konventionell: Zwei Riemen / zwei Schrittmotoren.

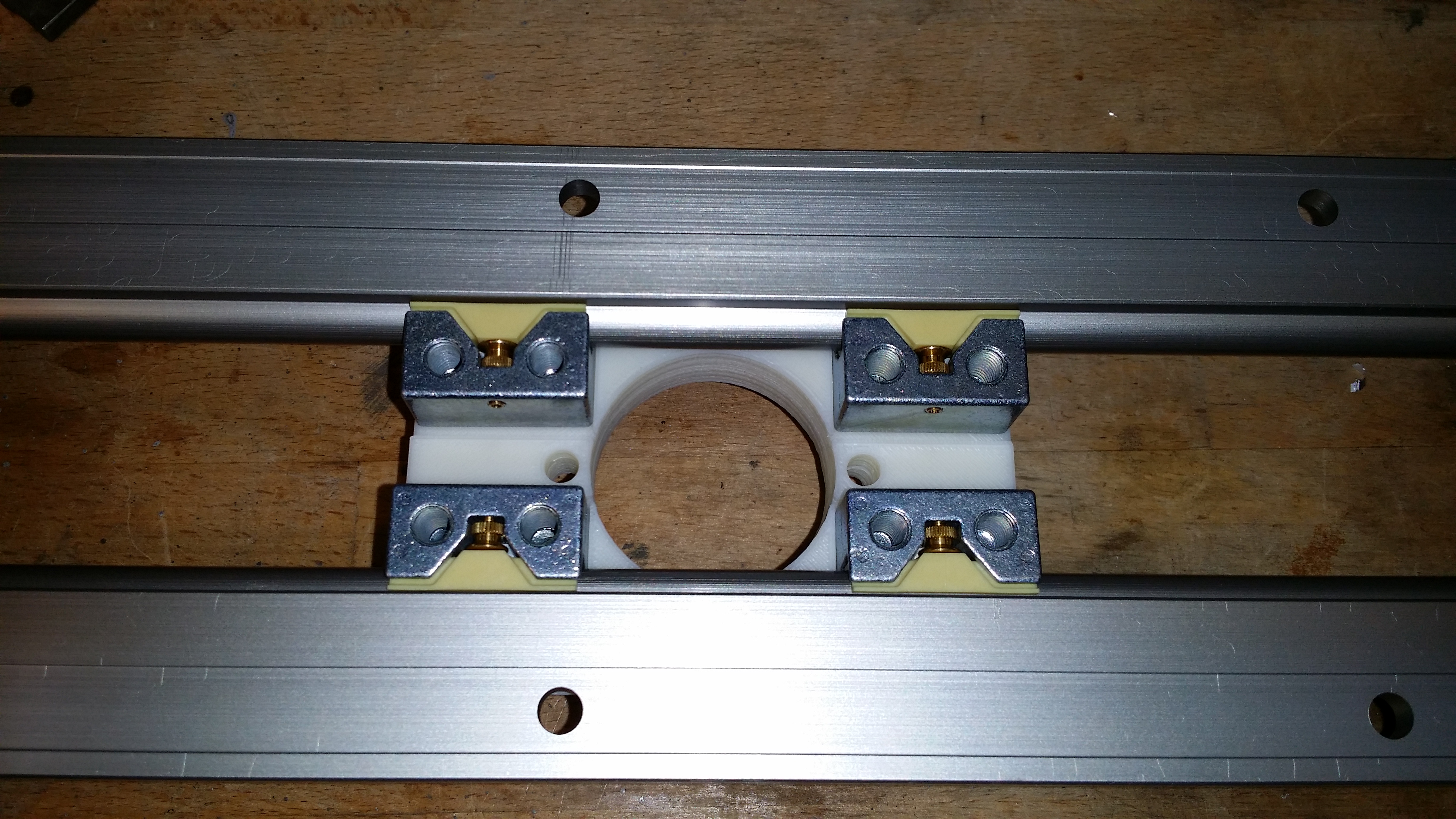
Dies war der letzte Stand. Das X-Carriage habe ich gedruckt, um eine möglichst hohe Kompatibilität mit den verschiedenen Extruder- und Hotendkonstruktionen zu erreichen. Je weiter ich allerdings komme und überlege, drängt sich mir der Wunsch auf, auch hier eine Aluminiumkonstruktion zu wählen. Aktuell hätte ich aber nicht mal das passende Material da. Schau’n wir mal …

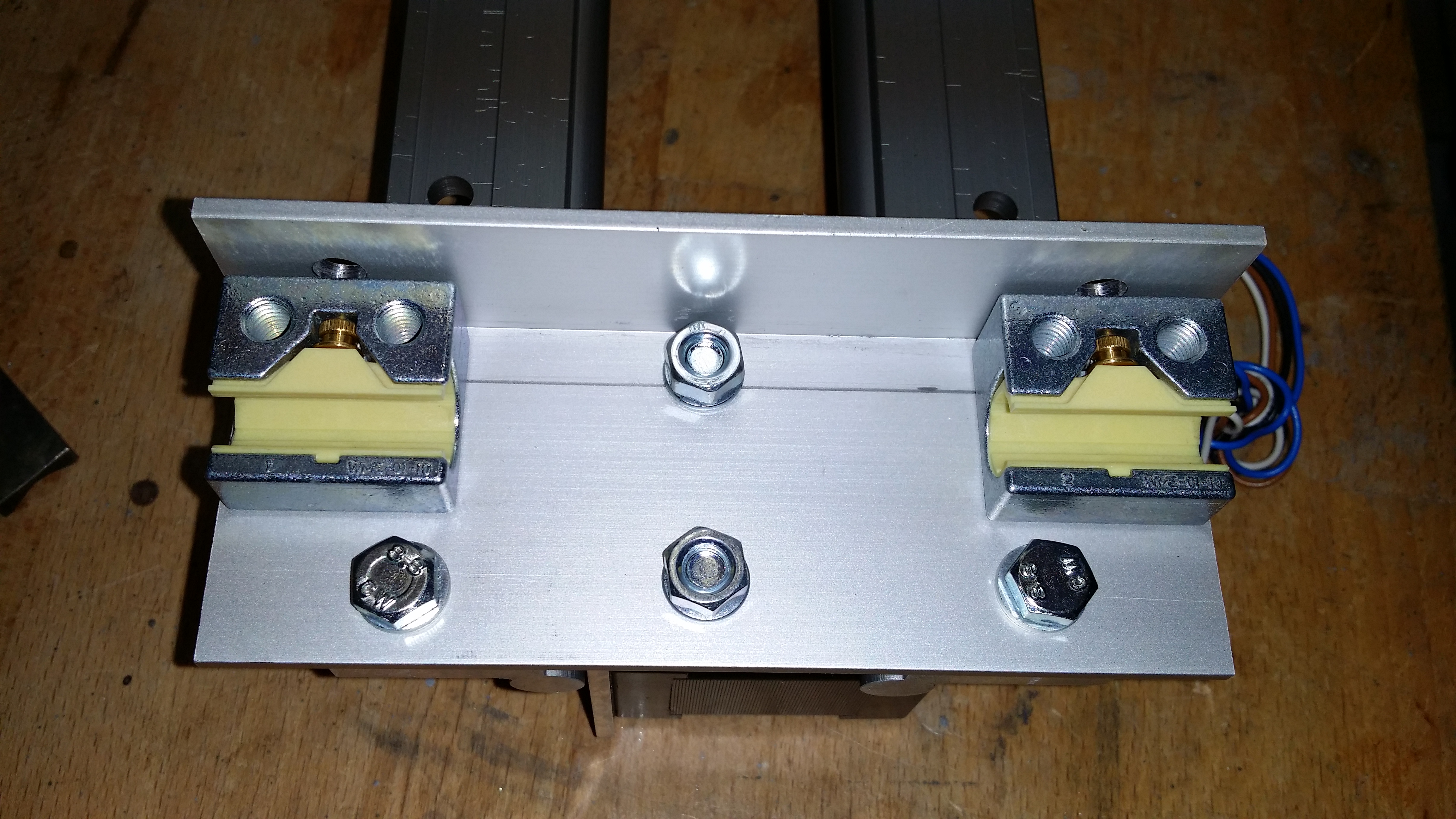
Aus einem Aluminiumwinkel habe ich diese Halterung herausgearbeitet. So eine ordentliche Fräse hat schon was. Alles passst auf Anhieb und sieht gut aus. Die zwei kleinen Löcher sind zur Befestigung des Schrittmotors mit 3mm-Schrauben und die große Aussparung ist an die Geometrie des Schrittmotors angepasst.
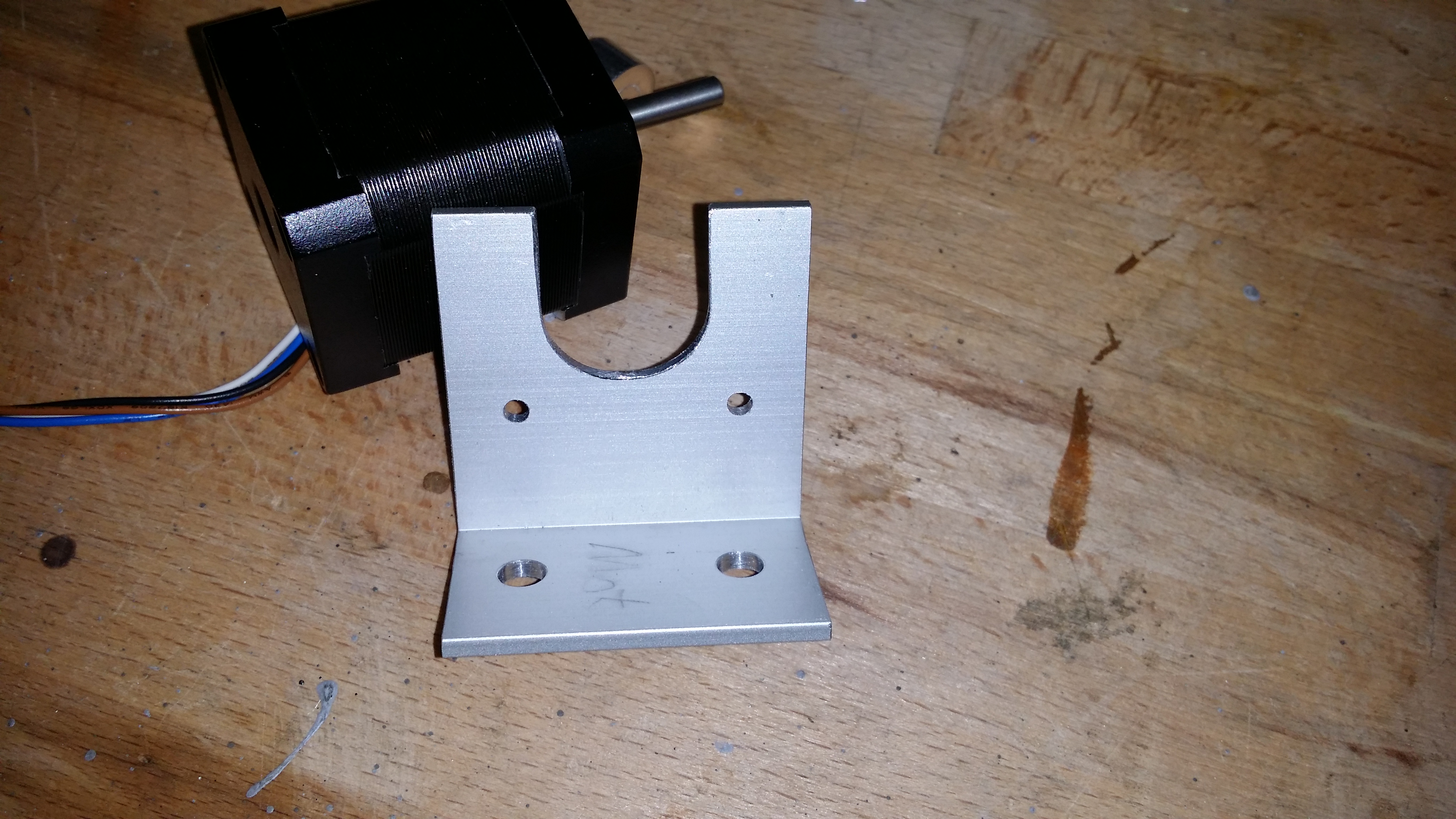
Die beiden großen Löcher unten sind zur Verschraubung mit der X-Achsenkonstruktion mit 6mm-Schrauben vorgesehen.

Hier ist der Motor provisorisch mit dem Winkel verbunden.
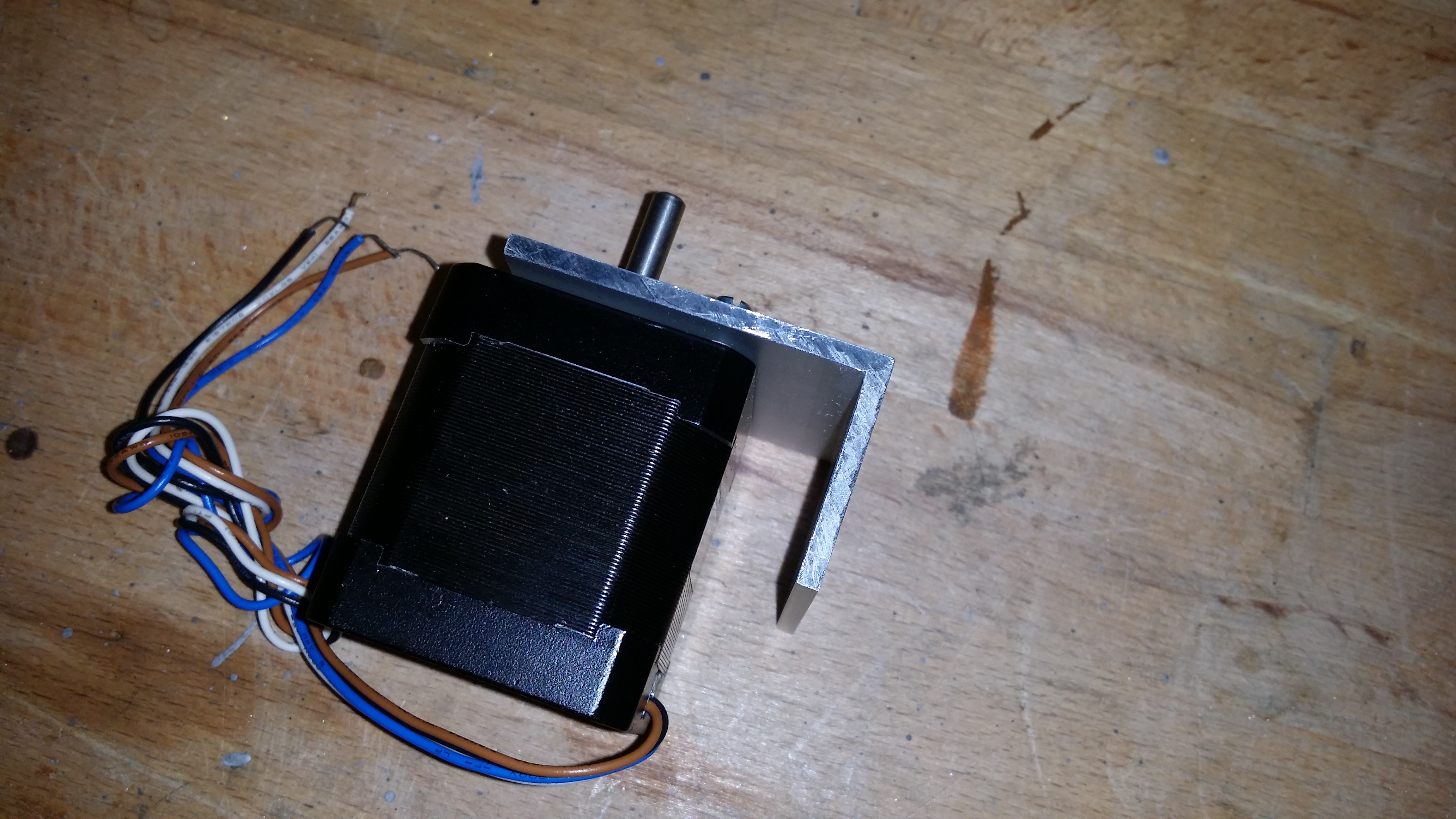
Das Gleiche aus der Seitenansicht.

Nur mal grob positioniert und noch nicht verschraubt …
Ich hatte geplant, dass die untere Länge des Riemens an das X-Carriage fixiert wird. Die obere Schlaufe des Riemens soll frei „schweben“. Die genaue Position musste ich also vorher ausmessen.
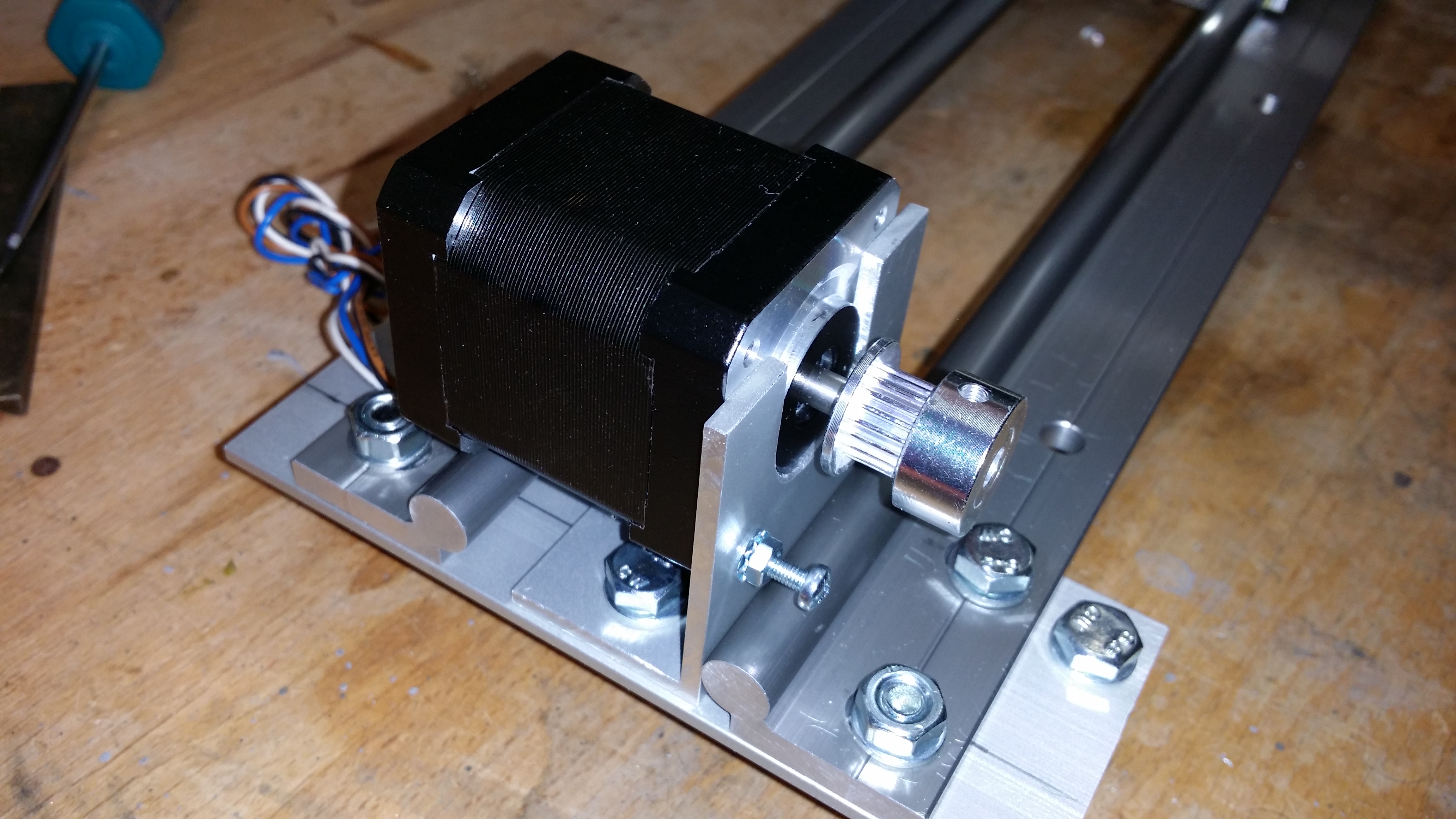
Hier ist der Motor bereits montiert und das Antriebspulley aufgesetzt. Unterseite Puley soll, wie gesagt, mit der Oberkante des Carriage etwa eine Linie bilden.
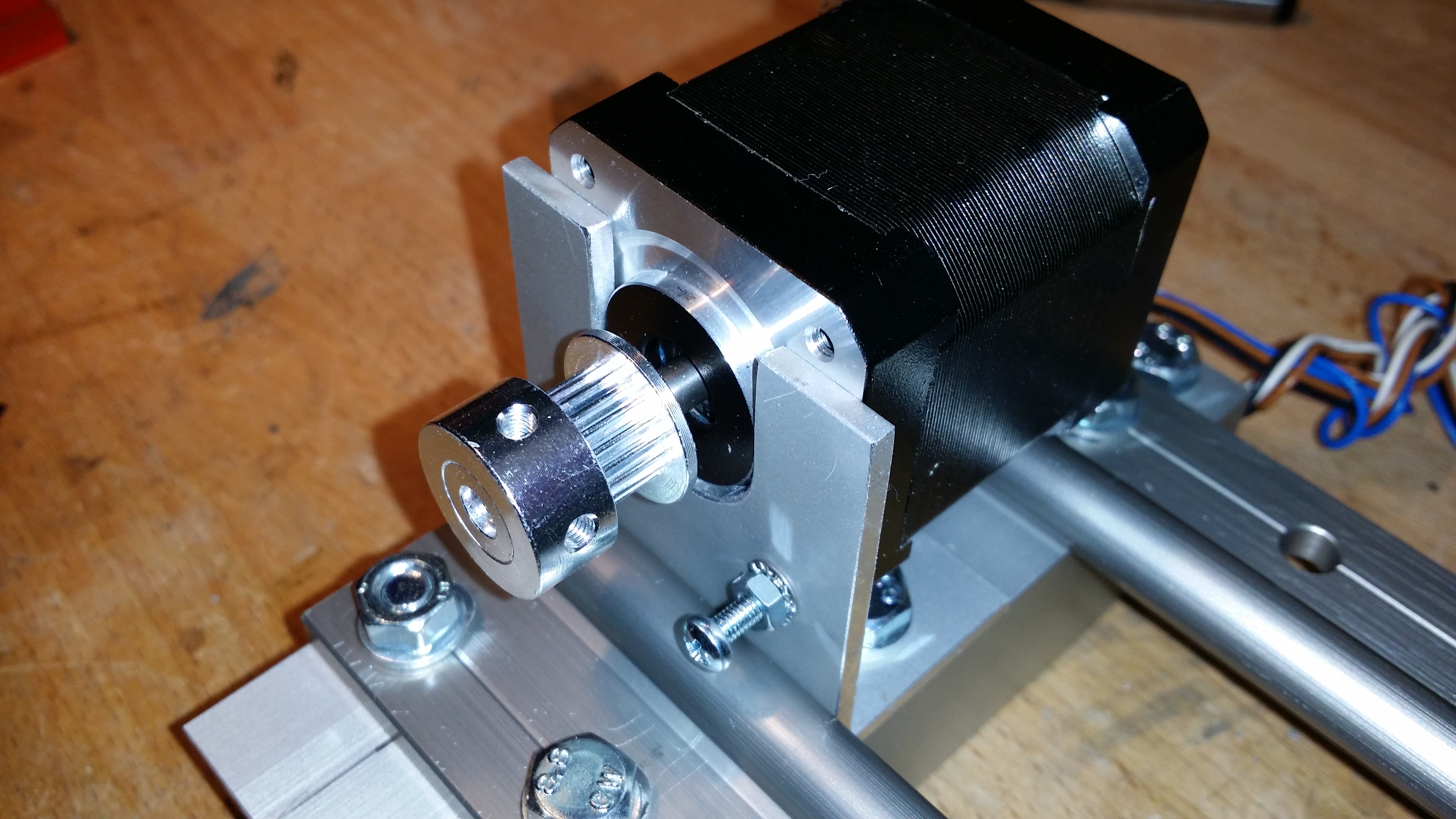
Von der anderen Seite ….
… und von unten.
Auf der Gegenseite stellte sich die Frage, ob ich ebenfalls ein zum GT2-Riemen passendes Pulley verwende oder die Konstruktion von meinem Mendelmax mit einer glatten Rolle aus Lagern verwende. Da das bei meinem Mendelmax so hervorragend funktioniert, habe ich die Lagervariante gewählt. Klar: Unterseite Lager soll wieder etwa Oberseite des Carriage sein, damit der Riemen möglichst gerade läuft. Und das sieht dann so aus:
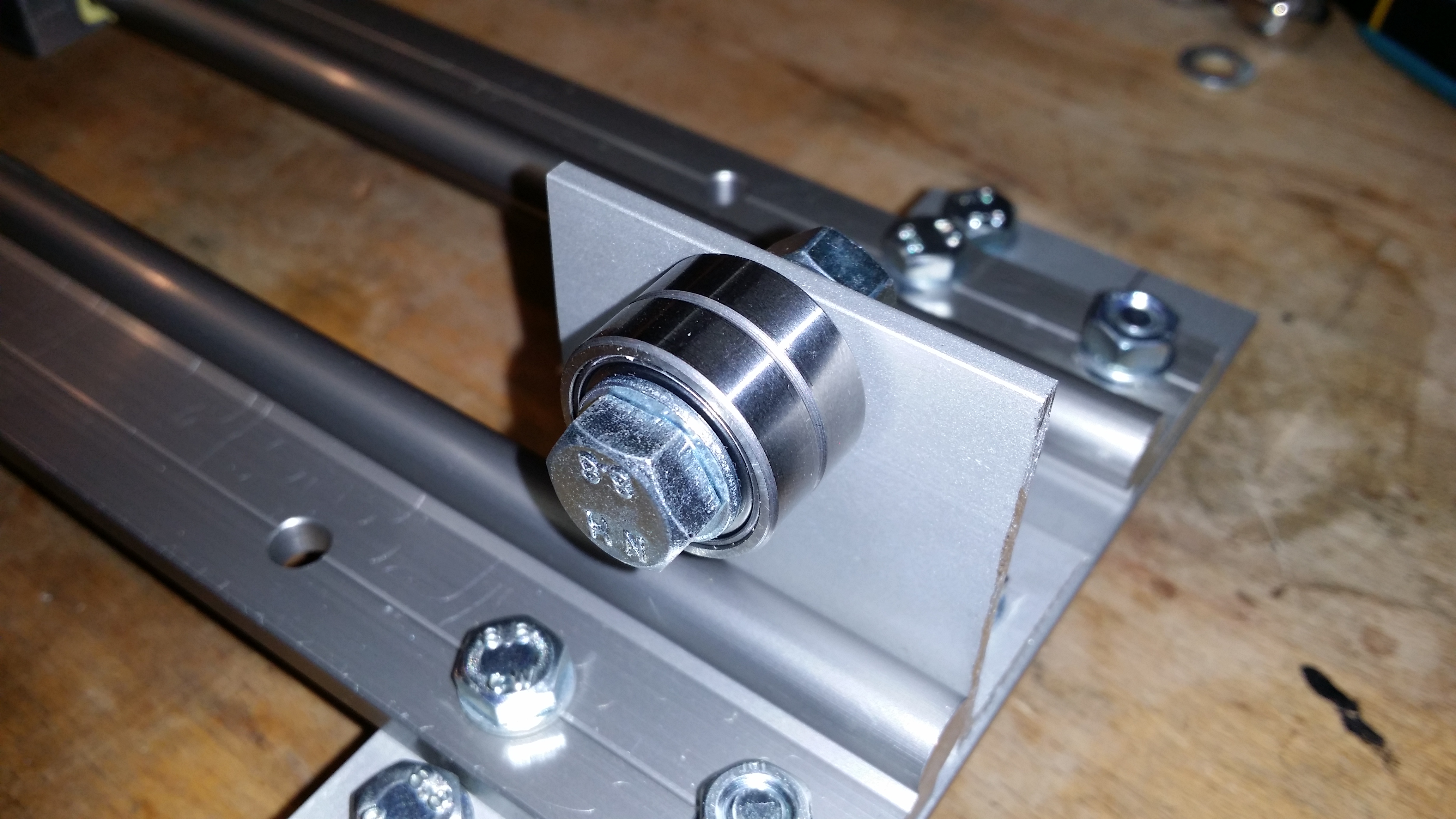
Im Gegensatz zum Mendelmax habe ich hier nur zwei Lager nebeneinander verbaut. Meine Beobachtung am Mendelmax mit 3 Lagern ließ mich annehmen, dass das hier ausreicht.
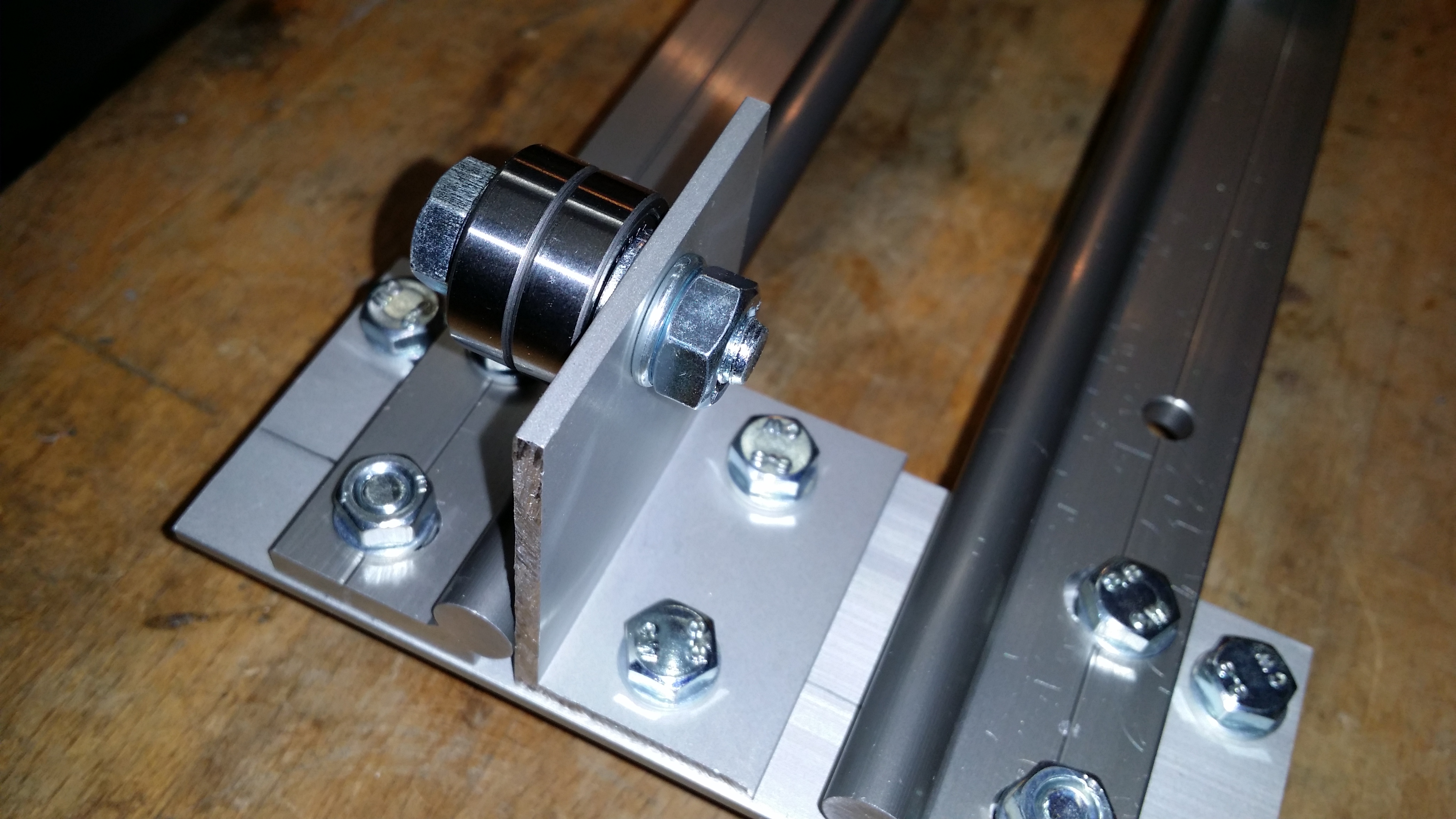
Die Maße und die Befestigung des Winkels ist identisch mit der Gegenseite.
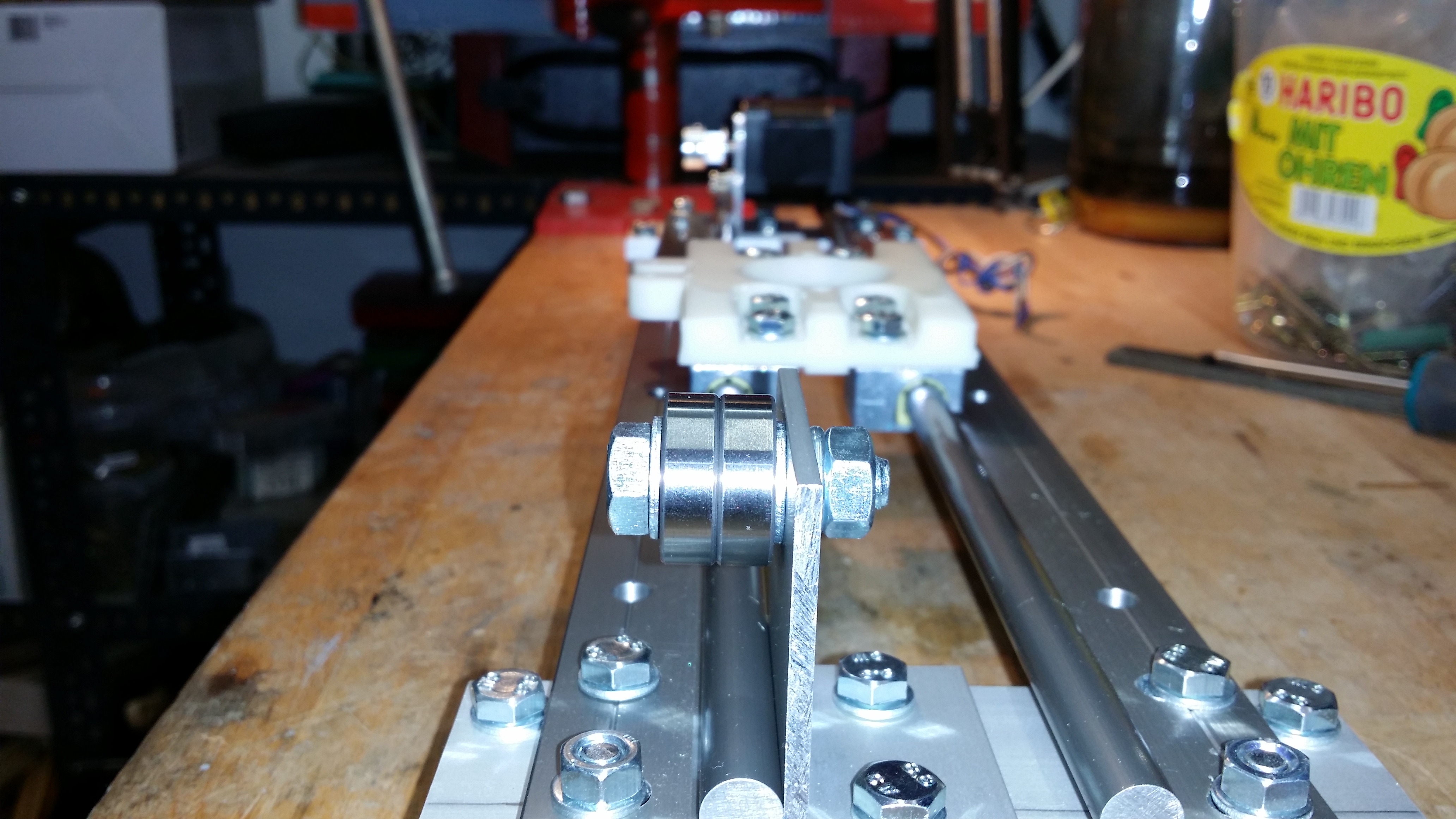
Sorry für die Schleichwerbung, – und HARIBO hat nicht mal dafür gezahlt. Das ist mein Sammelbehälter für gebrauchte Schrauben.
Laut Foto sollte alles ganz gut in einer Linie liegen. Was aber schon dem aufmerksamen Leser auffallen wird: Der Riemen wird nicht an den typischen Anschlussohren am Carriage befestigt, sondern direkt auf der Plattform. Die Motormontage ließ sich so deutlich besser realisieren.
Beim Fotografieren ist mir bei diesem Bild noch etwas aufgefallen:
Das ist ja die Unterseite des X-Carriages. Ich habe immer nach einer eleganten Möglichkeit gesucht um den Lüfter für das Hotend und eventuell eine Beleuchtung anzubringen. Hier ist sie. Die Gewinde der Gleiter sind noch weit genug nutzbar um von dieser Seite etwas zu befestigen.
Das war’s mal wieder für diesen Bauabschnitt. Ich hoffe, ich kann bald weitermachen.