
Aller Anfang …
Wie schon in einem früheren Artikel beschrieben, erzeuge ich mein Filament selbst. Dazu benutze ich den Filastruder. Um dann auch gleich den erzeugten Filamentdraht zu wickeln habe ich auch den Filawinder. Der ist bei mir mittlerweile schon ziemlich modifiziert, was größtenteils dem Umstand meiner großen Spulen (bis 5kg) zu verdanken ist.
Der Filawinder hat eine Vorrichtung, die den erzeugten Draht auf der Spule führen soll, so dass Wicklung neben Wicklung sauber auf die Spule kommt. Das ist mit einem Servomotor aus dem Modellbausektor umgesetzt. 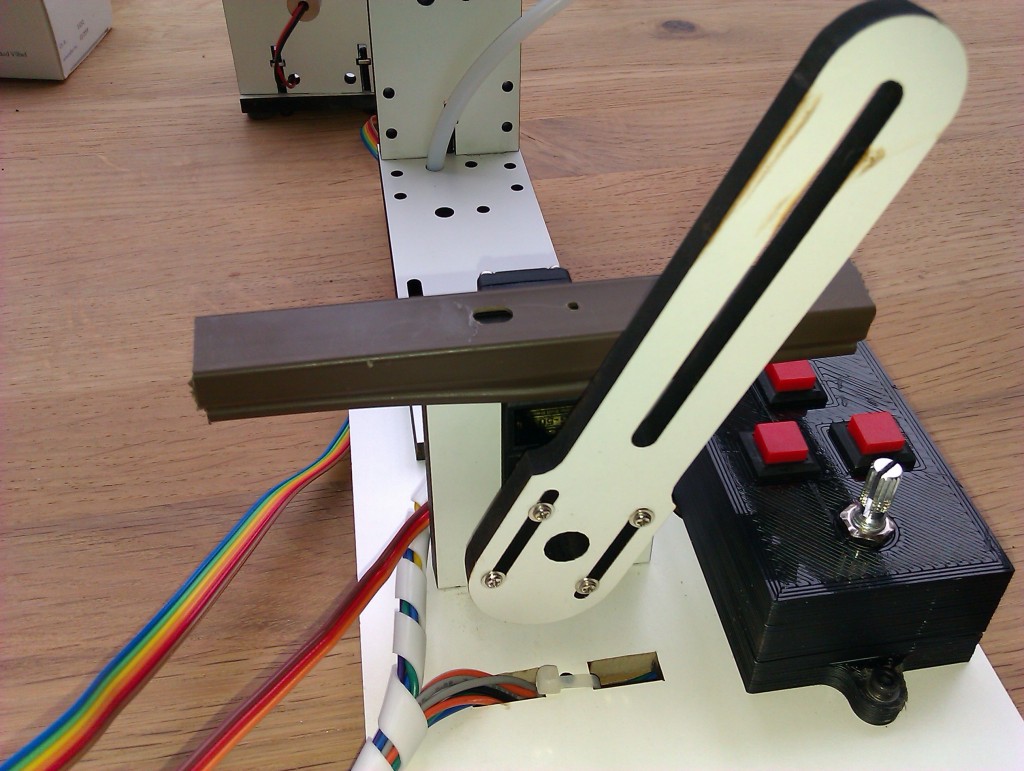 Ich denke, dass diese Lösung bei 1,75mm-Drähten auch ganz gut funktioniert. Bei meinem recht steifen 3mm-Draht und zudem meinen breiten Spulen tut sich diese Führung aber sehr schwer und schafft es nicht mehr sauber.
Ich denke, dass diese Lösung bei 1,75mm-Drähten auch ganz gut funktioniert. Bei meinem recht steifen 3mm-Draht und zudem meinen breiten Spulen tut sich diese Führung aber sehr schwer und schafft es nicht mehr sauber.
Mein Gedanke ist es, die Führung per Servo durch eine Führung per Schrittmotor und Gewindestange zu ersetzen. Was haben wir:
- Von einem Hallsensor am Spulenzahnrad kommt ein Signal pro Umdrehung der Spule.
- Der Durchmesser des Drahtes wird schon heute mit einem Jumper auf der Elektronik eingestellt.
- Der steuernde kleine Arduino kann auch noch den Schrittmotor steuern, – zumal der Servo ja wegfällt.
- Die Firmware der aktuellen Elektronik ist bekannt und liegt in bearbeitbarer Form vor. Servoanteil raus und Schrittmotorsteuerung rein sollte kein Thema sein.
- Stromversorgung ist mit 12V passend vorhanden.
Jetzt muss ich mich erstmal in das Thema reinarbeiten. Alles für erste Versuchsaufbauten ist vorhanden:
- Platinen oder Breadboard
- Schrittmotor NEMA17
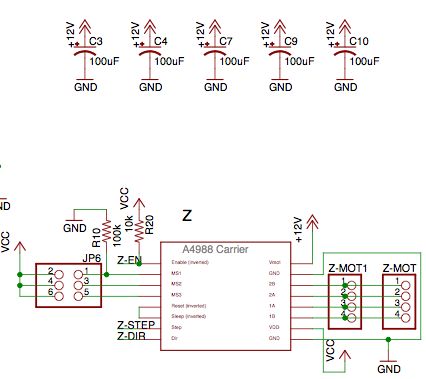
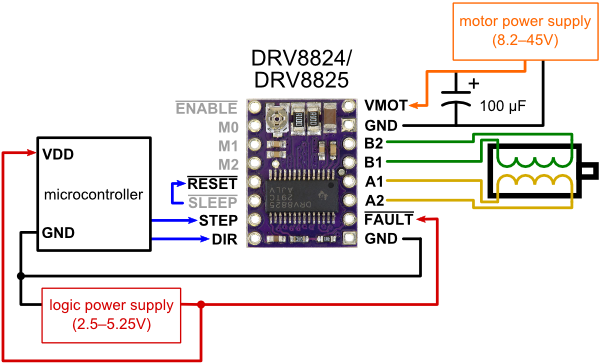
- Treiberbaustein Pololu DRV8825
- Arduino
- Stepperbibliothek habe ich gefunden: AccelStepper
- Schaltungsentwürfe von Pololu und RAMPS 1.4
- Draht, Kabel, Bauteile, Strom
- Mut zum Anfang
Die Schaltungsentwürfe:
Auf geht’s …