
Es wird Zeit sich mal um die Hardware zu kümmern. Hier gibt es einen Überblick, die Treiber werden eingesetzt und die Firmware wird übertragen.
Schauen wir uns das SKR 1.4 Turbo mal etwas genauer an.
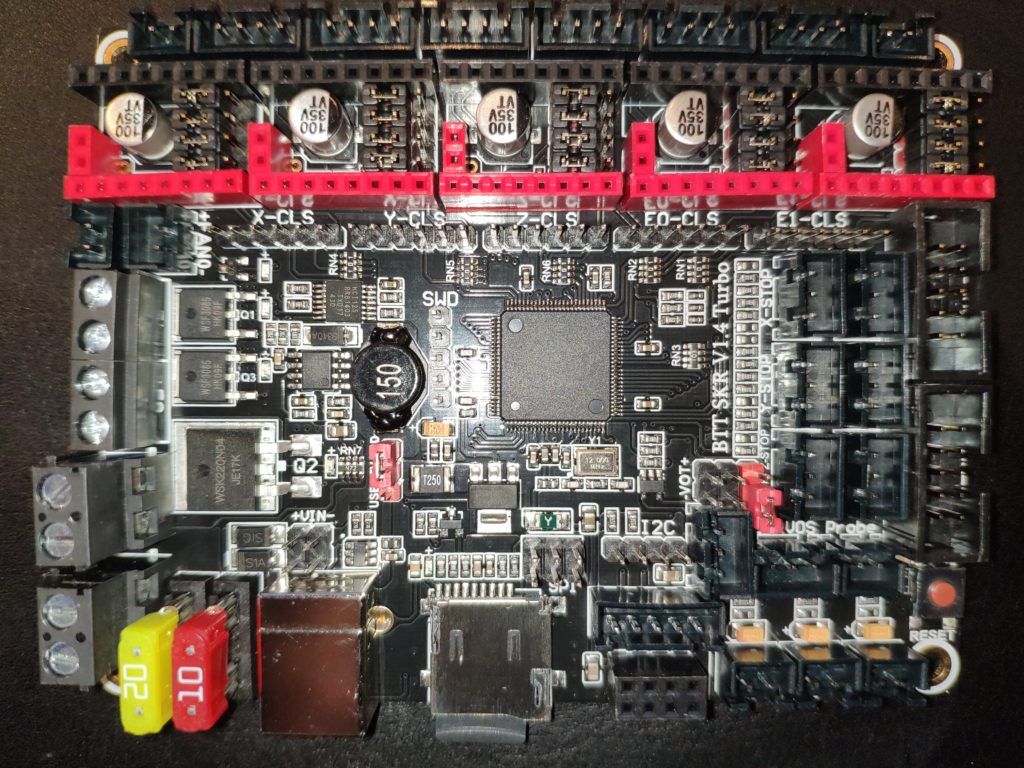
Ein wichtiger Jumper gleich zu Anfang. Links neben dem Prozessor unter dem Bauteil mit der auffälligen 150 befindet sich ein Jumper, der die Stromversorgung des Boards umschalten lässt. Will man das Board über USB versorgen, was gerade anfangs zum Flashen sinnvoll ist, muss der Jumper auf USB stehen. Später, wenn das Board im Drucker verbaut ist, muss der Jumper auf +5V VDD gesteckt werden. Die Kommunikation über den USB-Port ist natürlich immer möglich.
Von oben angefangen haben wir 6 Stepperanschlüsse:
X / Y / ZA / ZB / E0 / E1
ZA und ZB hängen elektrisch direkt zusammen an einem Treiberchip. Hier wurde nur dafür gesorgt, das man nicht noch einen Verteiler dazwischen bauen muss. Man kann aber den E1 zu einem Z2 umfunktionieren. Die Anzahl der Stepper-Treiber wurde in der Configuration_adv.h angegeben. Die Belegung mit Treibern habe ich in der Configuration.h definiert. Der ZB wird bei mir also leer bleiben.
Eingerahmt werden die Steckplätze für die Motoren von zwei FAN-Anschlüssen (FAN3 und FAN2). Die beiden Anschlüsse sind nicht steuerbar und ständig unter Spannung.
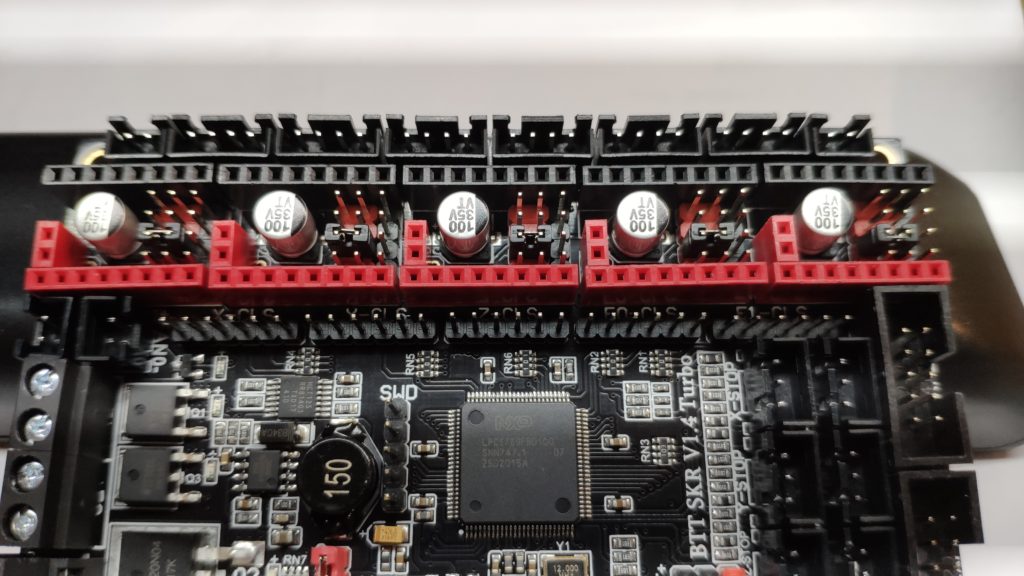
Unter den Motoranschlüssen sitzen die Fassungen für die Treiberchips. Besonders interessant dabei sind die zusätzlichen roten seitlichen Steckleisten mit zwei Steckplätzen. Eine Besonderheit der modernen Treiberchips. zwischen den roten unteren und den schwarzen oberen Steckleisten sieht man die Jumper, die je nach Lage die Feinheit des Steppings oder auch die Konfiguration des UART-Modes ermöglichen.
In der Platinenmitte sitzt der 32-bit Prozessor, der beim Turboboard mit 120MHz läuft.
Rechts findet man auf der Platine die Steckplätze für die Endschalter und ganz am Rand die Anschlusswannen für das Display.
Links von oben angefangen kommen nochmal 2 Lüfteranschlüsse: FAN1, wieder fest verdrahtet und FAN0, der steuerbar ist und übelicherweise als Bauteilkühleranschluss dient.
Darunter folgen die Schraubverbindugen für Extruder 1 und Extruder 0, Heatbed und Stromeingang.
Es bleibt nur noch der untere Rand übrig, der neben dem USB-Anschluss noch den SD-Card Steckplatz beherbergt und den Steckplatz für die WIFI-Option bietet. Ganz rechts werden die Thermistoren angeschlossen. Es gibt noch ein paar mehr Anschlüsse auf der Platine, auf die ich eingehen werde, wenn sie gebraucht werden.
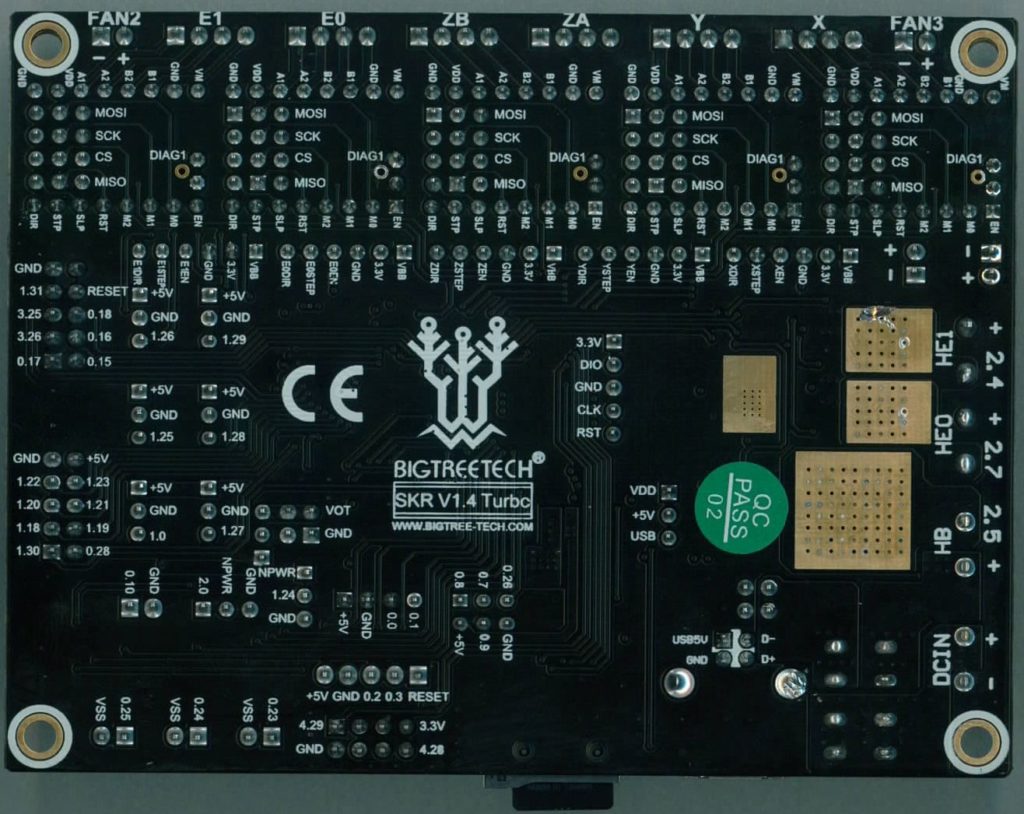
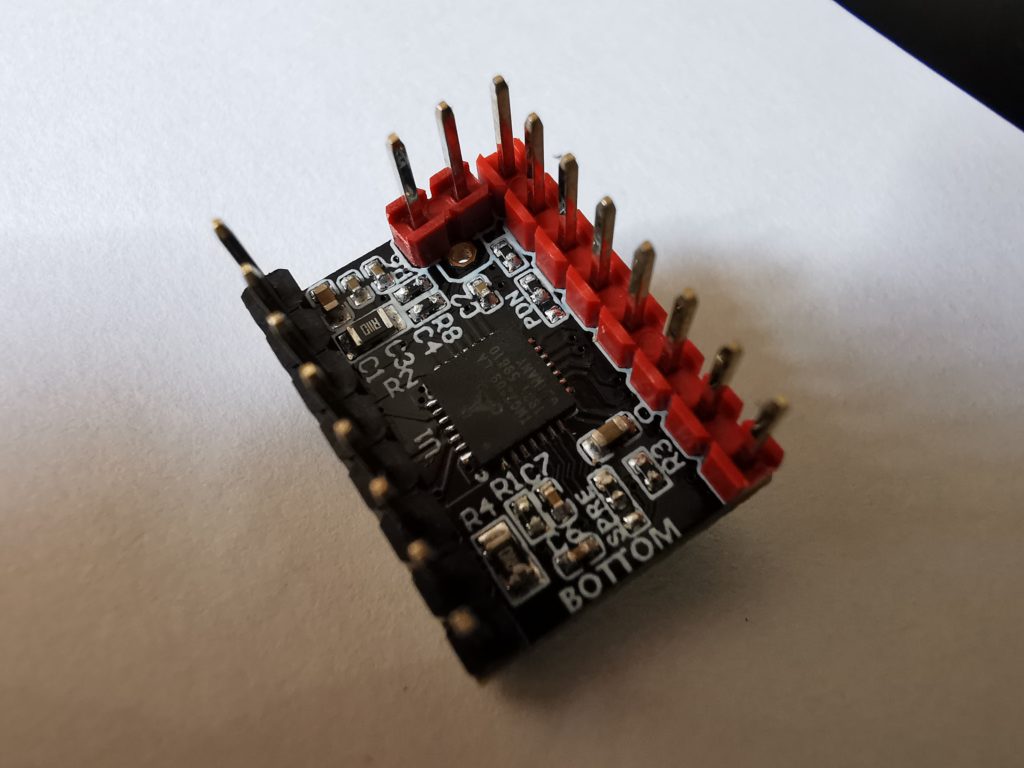
Was mir ganz besonders gefällt, ist die ausführliche Bezeichnung aller Anschlüsse auf der Rückseite der Platine.
Steckt man dieses Board ohne Treiberbausteine (Jumper auf USB) im Lieferzustand an den PC an, richtet das Betriebssystem vermutlich zunächst die notwendigen Softwaretreiber für den Zugriff ein. Ist das einmal erledigt, lässt sich das SKR-Board über einen Port ansprechen. Dafür ist jede beliebige 3D-Druckersoftware nutzbar. Ich benutze Simplify 3D dafür.
Die Antwort des Boards ist natürlich sehr unspektakulär, aber man freut sich über das erste Lebenszeichen. Die Zeilen informieren darüber, dass die Verbindung hergestellt wurde. Ohne jegliche Sensoren oder Treiber sind die folgenden Werte natürlich nutzlos.
Mit dem M122 Kommando, kann man eine weitere Antwort des Boards fordern.
Wie erwartet, kommt da natürlich auch nichts Sinnvolles außer der Bestätigung, dass das Board unbestückt ist. Aber damit fange ich jetzt an.
Die folgende Beschreibung gilt für die Kombination SKR 1.4 mit Bigtreetech TMC2209 V1.1 oder V1.2 . Andere Kombinationen, – speziell andere Treiberhersteller oder Versionen haben teilweise erhebliche Abweichungen in der Hardwarekonfiguration. Dazu empfehle ich diese Quelle. Als Beispiel für wesentliche Unterschiede seien genannt:
- Drivers TMC2209 ERYONE V3.0
- Drivers TMC2209 WATTEROTT V2.0
- Drivers TMC2209 MKS V2.0
- Drivers TMC2209 MKS V1.0
- Drivers TMC2209 FYSETC V3.0
Auf dem SKR Board müssen die Jumper unter den Treiberbausteinen angepasst werden um die speziellen Eigenschaften wie intelligente Kommunikation (UART) und Sensorless Homing nutzen zu können. Es wird nur der dritte Jumper gesetzt.
Die Treiber selbst werden auf der X- und Y-Position unverändert eingesteckt sofern man Sensorless Homing verwenden will.
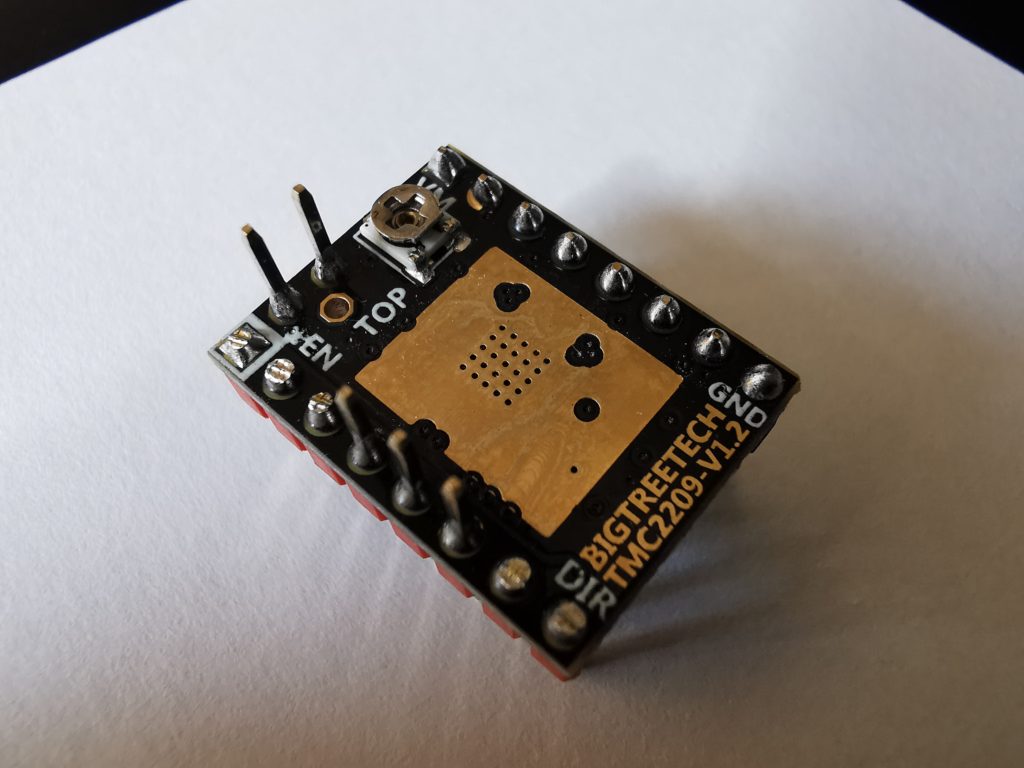
Das Potentiometer wird im UART-Betrieb grundsätzlich nicht benutzt.
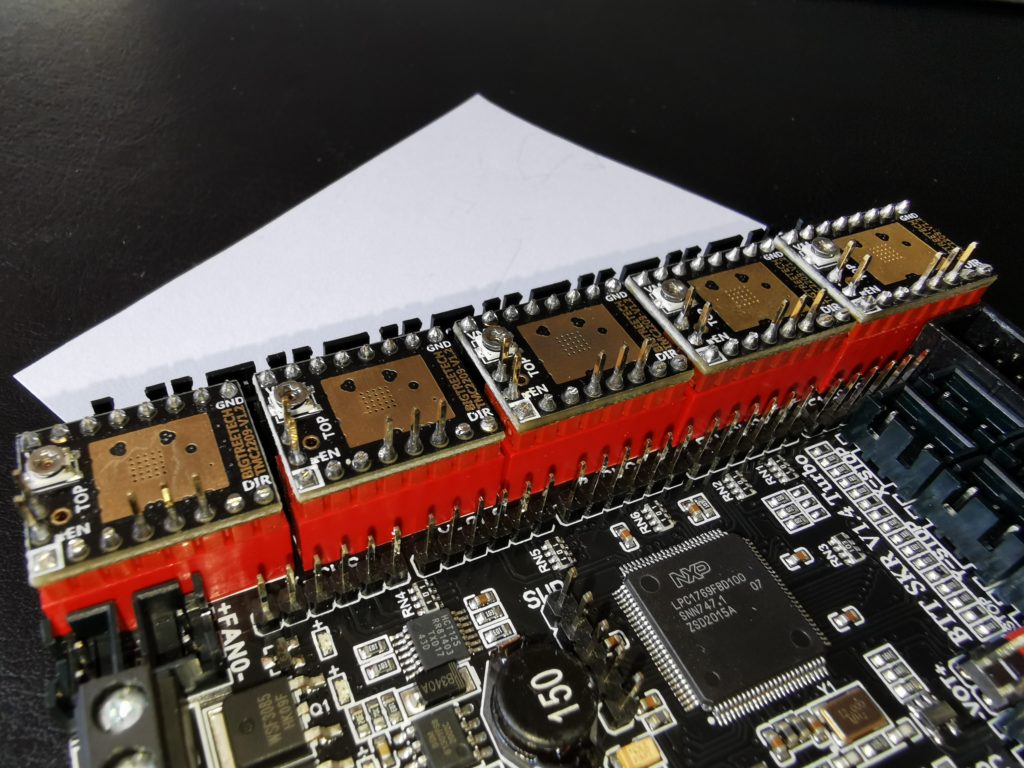
Es sollte klar sein, dass alle Pins sauber in die Fassungen auf dem Motherboard gesteckt werden müssen. Das Problem mit der Ausrichtung des Treibers dürfte sich wohl kaum stellen. Das folgende Bild zeigt nur die Ausrichtung. Der Treiber ist noch nicht vollständig eingesteckt.
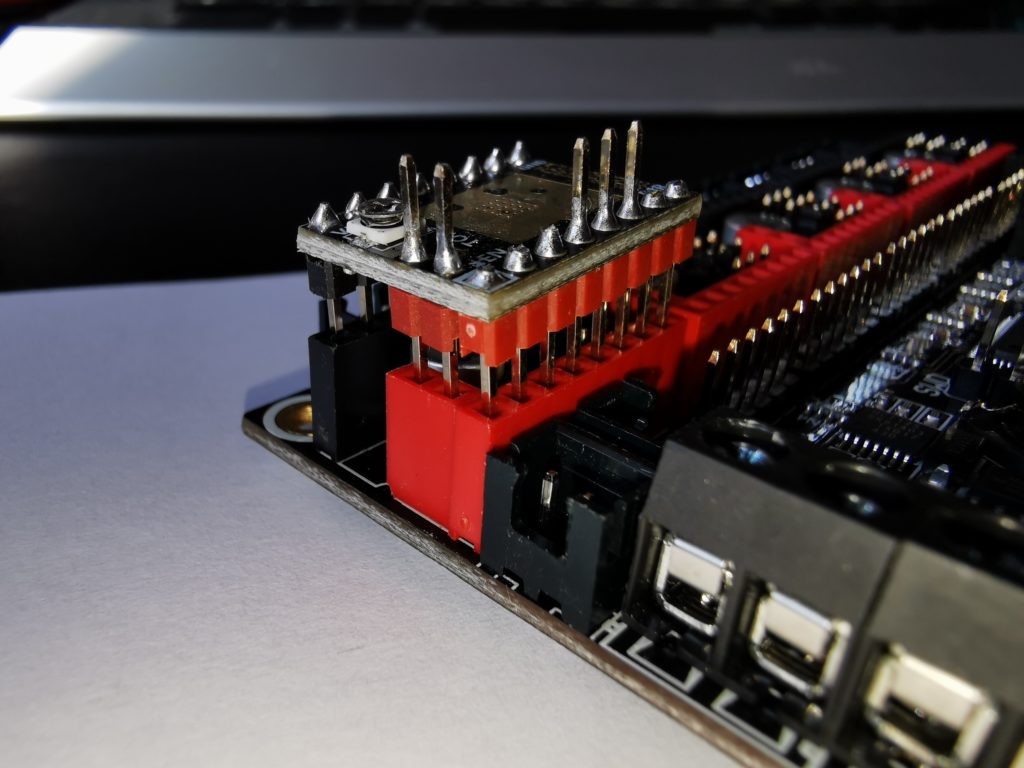
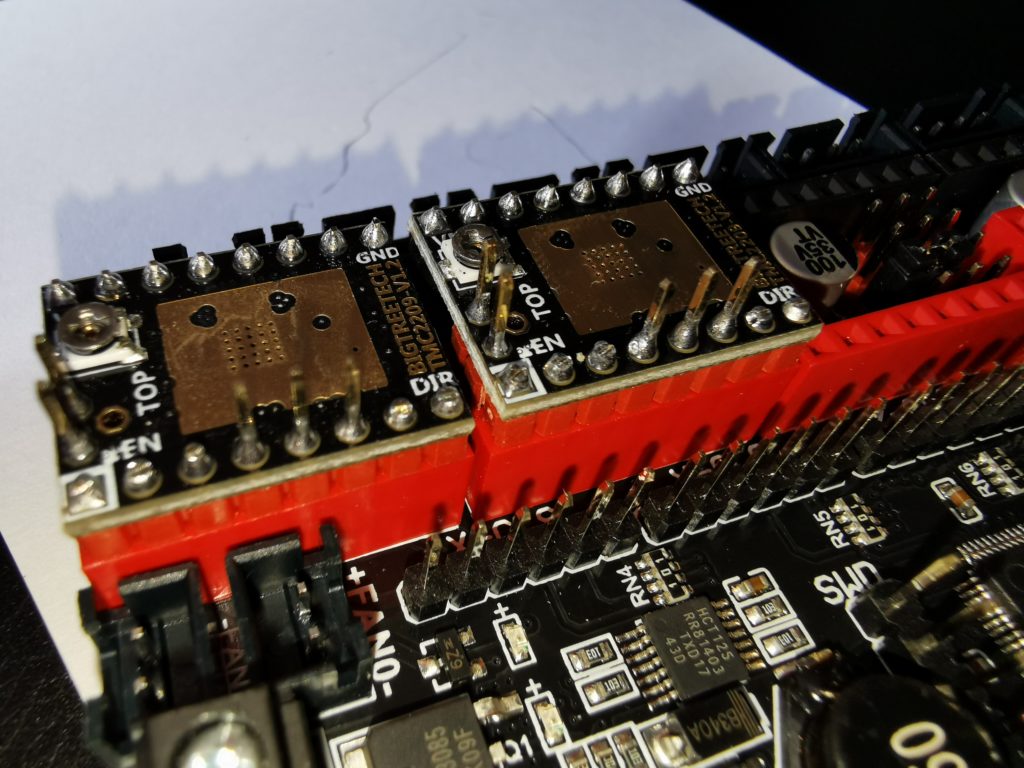
Die Treiber für X und Y sind vollständig eingesteckt.
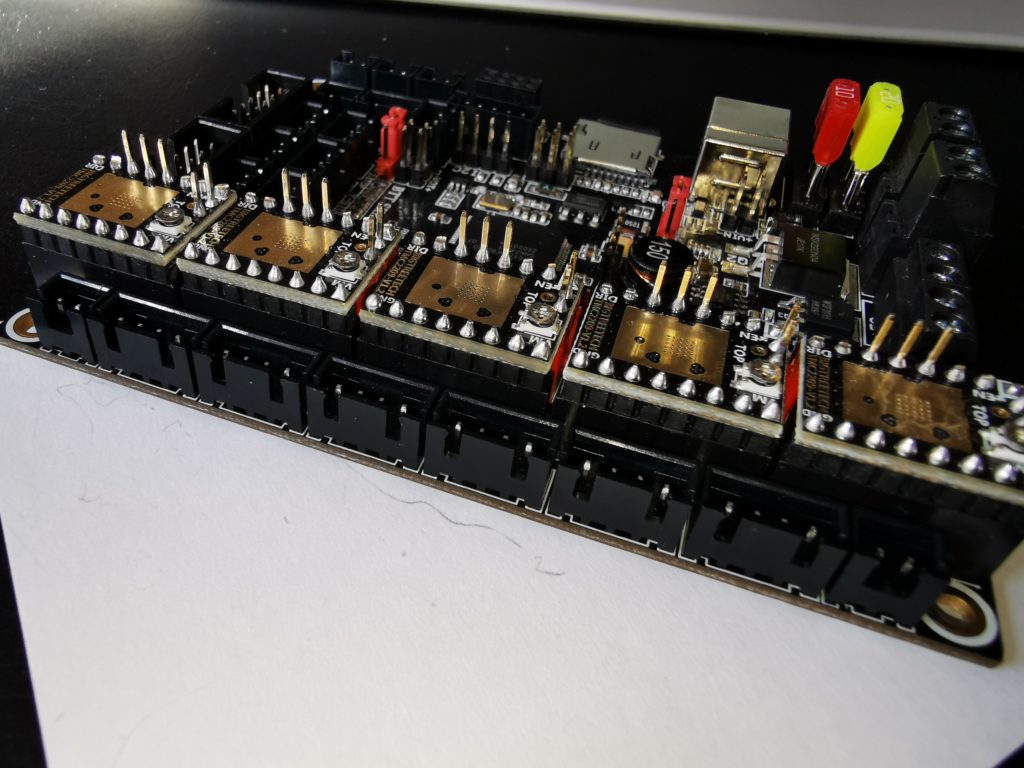
Weder für die Z-Achse noch für den Extruder verwende ich die StallGuard-Funktion. In der Z-Achse wird ein 3D-Touch (BL Touch) seinen Platz finden und bei Extruder gibt es kein Homing. Dafür müssen die Treiber angepasst werden. Der DIAG-Pin muss auf der Unterseite abgeschnitten werden. Das sollte so erfolgen, dass wirklich kein elektrischer Kontakt zwischen diesem Pin und der Fassung zustandekommen kann, – also direkt über der roten Fassung abschneiden.
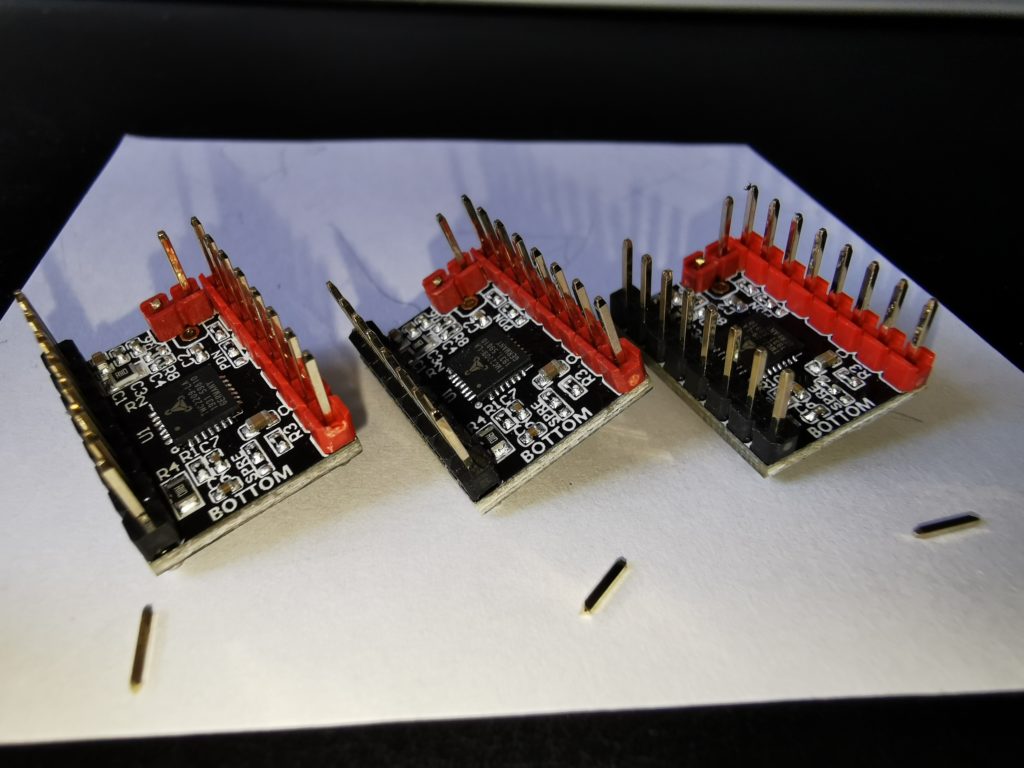
Ich halte überhaupt nichts davon, die Stifte seitlich zu biegen, damit sie die Fassung nicht treffen. Das wird zwar auf diversen Seiten so gezeigt, aber meines Erachtens ist die mechanische Last auf die kleine Platine beim Biegen zu groß und die Gefahr eines ungewollten Kontaktes mit anderen Komponenten ist auch gegeben. Zudem kann der Treiber dann nicht vollständig in die Fassung gesteckt werden. Sollte es später mal notwendig sein, den Treiber doch wieder vollständig zu nutzen, kann man mit geübter Hand auch einen neuen Stift einlöten.
Damit sind die Treiber vollständig gesteckt.
Es wird Zeit die Firmware zu installieren. Dafür wird auf die mit dem SKR-Board die firmware.bin als einzige Datei übertragen. Auf meiner Karte war bereits eine firmware.cur vom 21.04.2020 mit 157kB enthalten. Die habe ich sicherheitshalber gesichert.
Meine frisch erzeugte firmware.bin hat 207kB und liegt nun im Root der Karte.
Zuvor möchte ich aber mal testen, ob die UART-Kommunikation schon mit der enthaltenen Werksfirmware funktioniert. Ich starte dazu Simplify 3D und dann das Gerätebedienfeld. Auf dem Reiter Kommunikation geht es weiter.
Nach der Verbindung per USB leuchtet bereits die Betriebs-LED des Boards rot. Die Kommunikation wird über „Verbinden“ gestartet und das Board antwortet:

Mit dem M906-Kommando versuche ich mal Daten von den Treibern zu bekommen …

Das funktioniert und zeigt uns sogleich, dass die Treiber elektrisch richtig verbunden sind. M122 sollte sämtliche Parameter zeigen.

Leider Pech gehabt. Die Standard-Firmware unterstützt das nicht.
Ich stecke nun die SD-Karte mit der neuen Firmware in das SKR-Board.
Zumindest leuchtet schon mal ein grünes Licht über dem Kartenschacht auf, aber die Firmware wird so nicht gelesen. Neuer Versuch mit Neustart des Boards.
USB und damit Strom weg, Karte rein, Strom dran. Mal schaun.
Jetzt taucht auf einmal ein neues Laufwerk in meinem PC auf, das mir den Inhalt der SD-Karte zeigt. Die firmware.bin wurde zur firmware.cur. Ein sicheres Zeichen für die Verarbeitung. Neuer Test mit M122 nach Verbindung.

Ich bin begeistert!
Sofort fällt auf, dass jetzt E1 zu Z2 umbenannt wurde. Viele weitere Daten folgen.
Interessant wäre noch ein Test zur Erkennung der Firmware. Das geht mit M115.

Das hat also offensichtlich funktioniert. Viele der konfigurierten Parameter lassen sich hier wiederfinden.
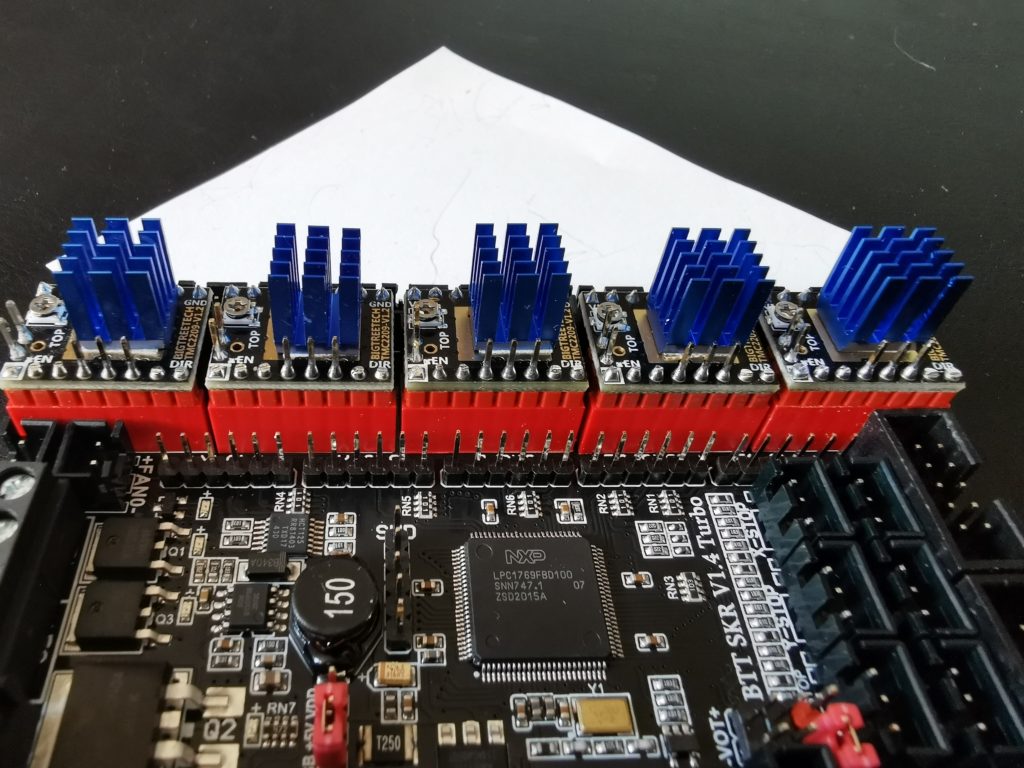
Ich trenne die Verbindung wieder. Zum Schluss werden noch die Kühlkörper aufgeklebt.
ich habe deb tronxy dises jahr gekauft , das flachband kabel wurde der stecker direkt auf das maderbort gesteckt,die schraube am gehäuse wurde an gebort,