
Der Ciclop führt drei Anschlüsse nach außen:
- Kamera
- Prozessboard
- Strom
Im Folgenden werden die Anschlüsse zum PC geführt und die Software eingerichtet.Der gesamte Prozess wird auf den bq-Seiten und den dort vorhandenen Links gut erklärt. Scrollt man auf der oben genannten Seite etwas nach unten findet man drei größere Buttons:

Der mittlere Button „Horus“ führt zu den notwendigen Links und Informationen. Wieder etwas nach unten gescrollt findet man einen Link für diverse Betriebssysteme, – ich behandle hier Windows. Zwei weitere Links auf dieser Seite führen zum Treiber auf der Logitech-Seite und zur Horus-Software für den Betrieb des Scanners. Die manuelle Installation für Win8.1 und Win10 ist nicht notwendig. Das System installiert den Treiber selbstständig.
Der USB-Anschluss der Kamera mit dem PC verbunden. Es gibt zwar zwei USB-Kabel, aber das Kamerakabel hat zumindest im Auslieferungszustand noch den Aufkleber von Logitech am USB-Stecker. Mehr oder weniger unbemerkt wird nach dem Anschluss der Treiber geladen und installiert. Das gilt wie gesagt zumindest für Windows 8.1 und 10.
Jetzt wird Horus geladen und installiert. Dabei werden auch sämtliche Arduino-Treiber und die Treiber für virtuelle Ports (wegen USB) installiert. Nach dem Start begrüßt und Horus mit diesem Dialog:
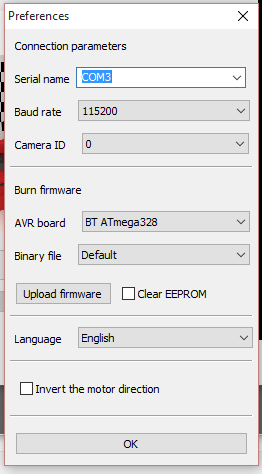
Eigentlich werden gleich drei Fenster geöffnet: Ein Terminal, ein Programmfenster und eben dieser Dialog. Wir wählen den Wizard der uns dann gleich ein „Connect“ anbietet. Das wählen wir.
Da ich die Kamera nicht eingesteckt hatte kommt natürlich eine Meldung.
Habe ich gemacht. Neuer Versuch …
Strom und USB des Boards eingesteckt und wieder ein neuer Versuch.
Die Parameter werden erkannt. Jetzt aber …
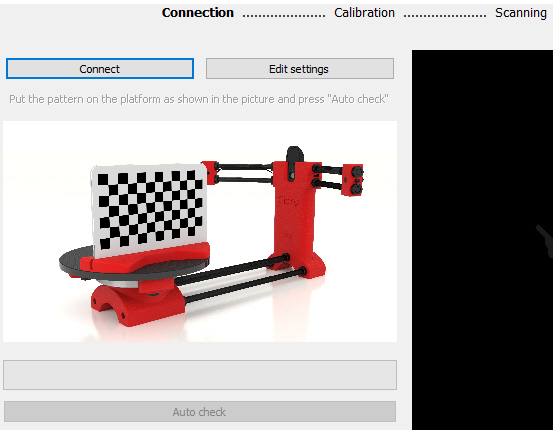
Sowohl das Terminal als auch der Dialog zeigen jetzt den Erfolg an.
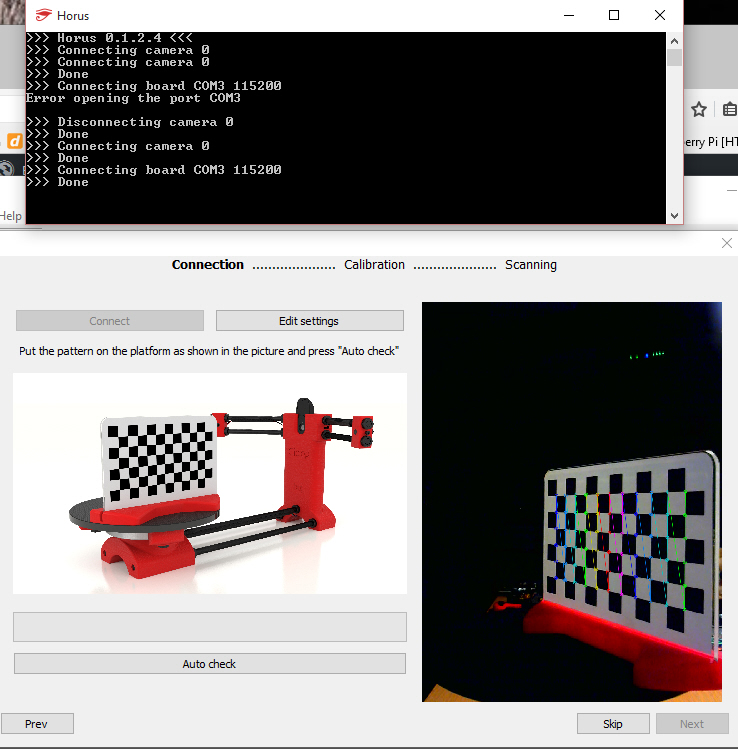
Das Bild auf der rechten Dialogseite kommt bereits von der Kamera und zeigt auch schon gewisse Markierungen. Das Calibriertarget steht aber noch nicht richtig. Ich passe das an die Grafik links an und drücke „Auto check“. Die Beleuchtung sollte einigermaßen passen. Ich hatte zunächst zu viel Hintergrundlicht und dann zu wenig von vorn. Nachdem ich da etwas korrigiert hatte und mit den „Edit settigs“ gespielt hatte funktionierte es. 3 Fehlversuche und es klappte, – akzeptabel. Der Erfolg wird mit „All OK. Please press Next to continue“ angezeigt.
Wir befinden uns damit im Kalibriermodus. Der Button „Calibrate“ sollte uns weiterbringen. Mit sehr guten Grafiken wird erklärt, was zu tun ist.
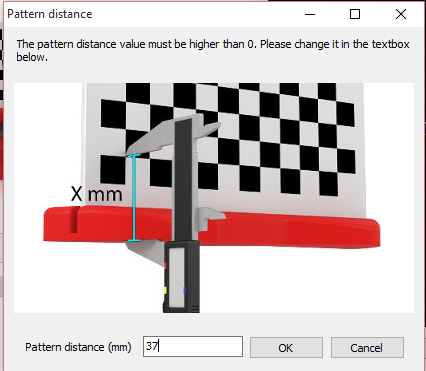
Das Target dreht sich nun wieder und man sieht einige Male die Laser in Aktion. Offensichtlich wird danach noch irgendeine Vermessung vorgenommen, denn man sieht auf dem Kamerabild entsprechende Muster. Mit „Next“ geht es nach der Erfolgsmeldung „All OK“ weiter.
Das Dialogbild ändert sich jetzt und ein paar Einstellungen können vorgenommen werden.
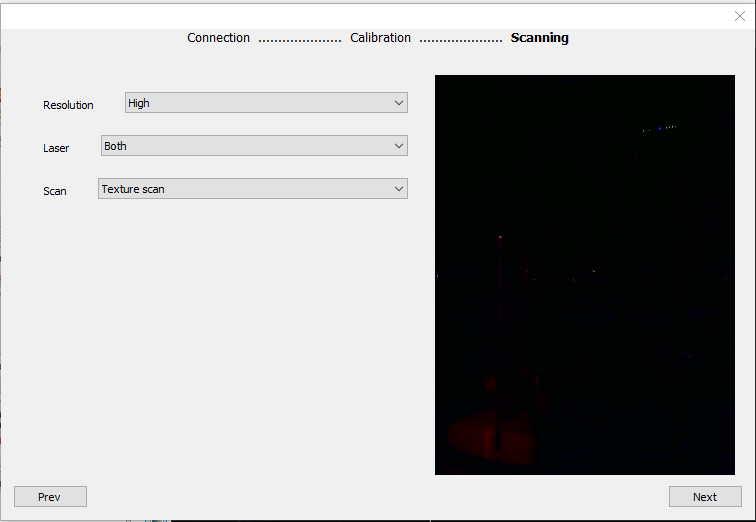
Wird schon passen so. Ich ändere nichts und suche mir einen Gegenstand zum Scannen. Ich habe mir ein kleines Modellauto ausgesucht. „Next“ -> der Dialog verschwindet, ein anderer kommt und erklärt, was zu tun ist. „Press play to scan“.
In sehr kleinen Schritten dreht sich der Teller und die Laser blitzen wechseln auf. Auf dem Bild tut sich was ….
Das könnte was werden …
Fast fertig nach gut 6 Minuten.
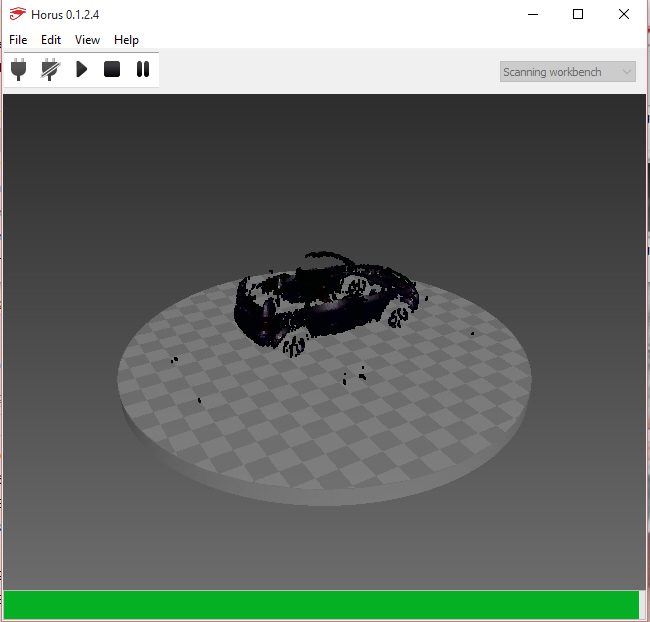
Das Programm bietet an, die Pointcloud zu speichern. Der Teller im Programm lässt sich jetzt samt Modell mit der Maus räumlich drehen und über das Scrollrad der Maus auch Zoomen.
So ganz glücklich bin ich mit dem Ergebnis nicht. Aber ich habe ja auch massiv gegen die Vorgaben verstoßen. Gewisse Oberflächen, wie eben diese Metalliceffektlackierung sind nicht so gut geeignet. Aber auch die Beleuchtung für diesen ersten Versuch war alles andere als optimal. Ich habe den Scan im PLY-Meshformat gespeichert, – das einzige Format, was ich jetzt gesehen habe. In FreeCAD lässt sich die Datei als Punktwolke importieren und auch 3-dimensional bewegen.
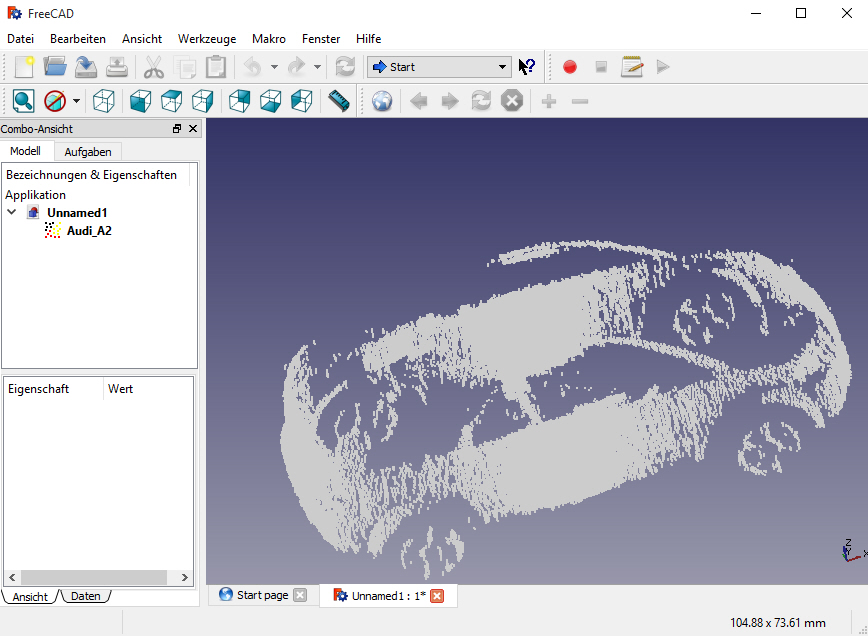
Es sieht hier nicht spektakulär aus, aber wenn man die Darstellung bewegt, ist es schon gar nicht so schlecht. Das Modell sieht übrigens so aus:

Beim nächsten Mal suche ich mir mal was Konformeres zum Scannen aus …
Guten Tag
Vielen Dank für den Super Blog, welchen Sie da geschrieben haben. Das ist sehr hilfreich bei Kaufentscheidungen. Der Steckplatz für einen weiteren Steppermotortreiber könnte verwendet werden, um die Kamera per Spindel in der Vertikalen zu verstellen. So könnte bei einem Scan die Kamera Bilder aus verschiedenen Perspektiven machen und diese dann zusammensetzen. Dürfte aber ein etwas grösserer Programmieraufwand bedeuten.
Besteht die Möglichkeit, dass die Kamera durch eine Bessere ersetzt werden kann? Zum Beispiel eine Full-HD (oder 4K) Webcam oder eine Spiegelreflexkamera. Mit einer Spiegelreflexkamera und einem passenden Objektiv könnte bestimmt ein besseres Ergebnis erzielt werden.
Vielen Dank und Gruss
Sven
Danke für das Kompliment. Das gibt mir den nötigen Schwung weiterzumachen.
Aber zur Frage: Die Kamera ist überhaupt nicht mit dem Ciclop verbunden. Die Ciclop-Steuerplatine, für Drehung und Laseraktivierung, und die Kamera sind einzeln an den Rechner angeschlossen. Ich sehe deshalb grundsätzlich kein Problem, sofern die Horus-Software mitspielt. Ich habe gerade mal eine alte Philips Camera angeschlossen. Die wurde zwar vom WIN10 erkannt, aber ich habe sie unter Horus nicht auswählen können. Das war aber nur auf die Schnelle probiert. Ich werde es mal genauer unter die Lupe nehmen und in einem der nächsten Testteile berichten.
Übrigens waren die schlechten Ergebnisse des ersten Teils meinem absoluten Unwissen zuzuschreiben. Mittlerweile funktioniert das schon wesentlich besser. Ich habe nur zur Zeit etwas wenig Freizeit zum Schreiben.
Bei der Software 0.1.2.4 kriege ich es nicht hin, das farbige Muster zwischen den Karos erscheint.
Hallo, ich habe das selbe Problem das das farbige Muster nicht erscheint.
Hast du eine Lösung gefunden?
Viele Grüße
Frank
Hallo Thomas,
vielen Dank für diese Beschreibung.
Habe mir einen solchen Ciclop Bausatz gekauft.
Habe aber das Problem das die Laserstrahlen bei mir sich nicht in der Mitte des Drehtellers kreuzen sondern viel weiter hinten.
Also auf der Kalibrier Tafel mit den Karos sind die Laserstreifen ganz außen.
Habe schon Stundenlang im Netz gesucht scheinbar hat das Problem niemand?
Muss man das die Gewindestangen einfach biegen, damit das stimmt?
Hallo,
ich könnte mir vorstellen, dass der Abstand zwischen Drehteller und der Säule nicht stimmt. Die Gewindestangen sollten zumindest nicht gebogen werden, sofern sie nicht schon krumm sind.
Hallo Andreas,
ich habe die inneren Muttern der Laerfixierung nach innen gedreht und die Laser so mittig ausgerichtet. Wenn man den Drehteller abnimmt, kann man das gut über die Antriebsspindel des Motors sehen.
Gruß, Kirby.
Hallo , bei meinem Ciclop gehen die Laser bei der Kalibrierung aus .. .. Bei Lasertest und Scannen funktionieren sie .. ? was ist da los ? was kann ich tun ? .. Danke für Antwort
Hallo Björn
Meine Laser gehen bei der Kalibrierung auch aus. Hast du eine Lösung gefunden?
Viele Grüße
Frank
Hallo Björn,
soweit ich mich erinnern kann, bleiben die Laser bei der Kalibrierung auch nicht dauerhaft eingeschaltet, sondern nur sporadisch. Ich kann das aber jetzt nicht mehr ausprobieren, da ich den Scanner nur zu Testzwecken hier hatte. Schau doch mal in den einschlägigen Foren nach. Wenn ich nicht mehr weiter weiß oder Anregungen suche, schaue ich auch immer in den entsprechenden Foren nach.
Tut mir leid, dass ich Dir da nicht weiterhelfen kann.
Hallo ich habe mir diesen he3d Scanner gekauft nun eine kurze frage könnte man den laser genauer einstellen/kalibrieren in den man sich die beiden Blätter mit den schwarz/Weiss Karos erneut ausdruckt mit kleineren Karos? Danke daniel
Noch eine Frage habe ich muss ich beim Einbau der 2 laser etwas beachten Stellung oder so
Danke
Leider kann ich zu dem Scanner nicht mehr viel sagen, da ich nicht mehr über das Gerät verfüge. Es war damals nur eine Leihgabe zum Testen.
Aber vielleicht kennt sich ja ein anderer Leser des Blogs damit aus. Ich würde mich freuen, wenn eine Antwort kommen würde.